 2015-06-04
2015-06-04 3507
3507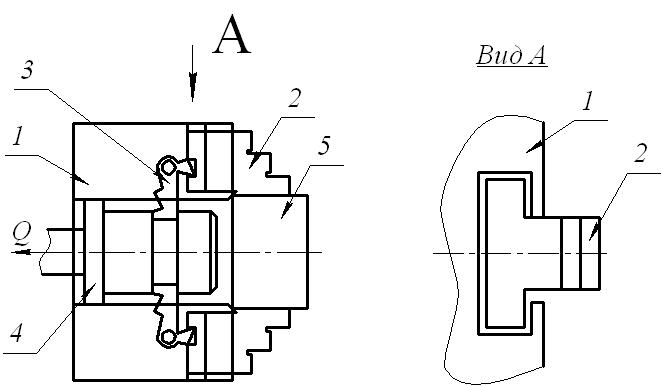
Рис. 57.
На рис.57 представлено устройство кулачкового патрона, включающее корпус 1, кулачки 2, способные перемещаться в радиальном направлении в соответствующих С – образных пазах, Г – образных рычагов 3, взаимодействующих с кулачками и приводной муфтой 4, связанной с поршнем пневмоцилиндра. Число кулачков обычно составляет 2, 3 или 4. Смещение муфты 4 влево под действием рабочего усилия Q приводит к повороту рычагов, которые в свою очередь смещают кулачки к центру патрона (цикл закрепления заготовки 5). Силы резания PX, PY и PZ. В соответствии с методами статики они эквивалентно заменяются одной радиальной силой 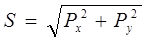 и моментом сил резания:
и моментом сил резания:  (рис.58 а, б).
(рис.58 а, б).
Найдем минимально необходимые усилия зажатия детали в кулачках для следующих трех случаев:
а) при действии радиальной силы S.
Рассмотрим момент времени, когда сила S располагается в срединной плоскости одного из кулачков. При усилии зажима, меньшем минимально необходимого, деталь несколько перекашивается, раздвигая кулачки (рис.59). Полагая угол α исчезающе малым и записывая уравнения моментов относительно точек А и В, найдем реакции NA и NB:
 (14)
(14)
 (15)
(15)
Рис. 58.
Отсюда минимально необходимое значение усилия зажима заготовки:
 (16)
(16)
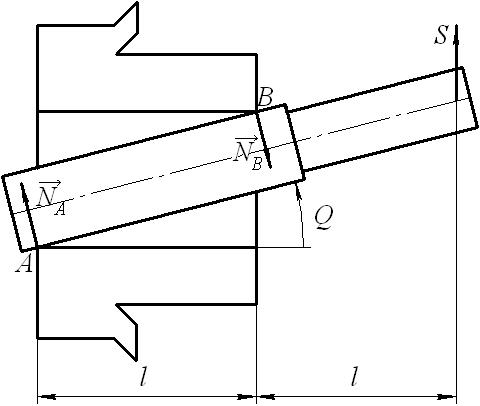
Рис. 59
б) при действии момента резания.
Момент резания преодолевается тангенсальными силами трения между кулачками и заготовкой (рис. 60).
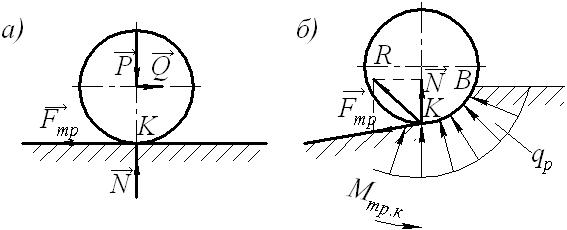
Рис. 60.
Минимально необходимое усилие зажатия определяется из условия равновесия моментов:
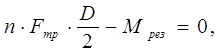
где n – число кулачков; 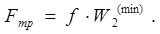
Здесь:  (17)
(17)
в) при действии осевой силы.
Действие осевой силы составляющей силы резания PX (при отсутствии упора) воспринимается силами трения между кулачками и заготовкой, действующими в осевом направлении. Отсюда минимальное усилие зажатия определяется равенством
 (18)
(18)
г) при совместном действии осевой силы и момента резания.
Силы трения, действующие при передаче момента и передаче осевой силы резания, взаимно перпендикулярны. Отсюда значение минимальной составляющей силы зажатия:
 (19)
(19)
Окончательно, минимально необходимое усилие принимается равным наибольшему из найденных значений:  ,
,  или и
или и  . Фактическое усилие зажима находится с учетом необходимого запаса по формуле (3.2).
. Фактическое усилие зажима находится с учетом необходимого запаса по формуле (3.2).
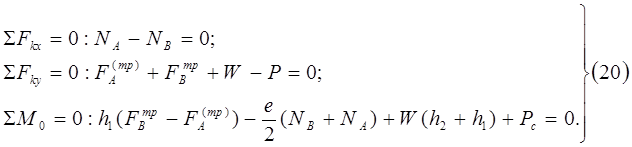
Для определения рабочего усилия Q (см. рис. 4.3) последовательно рассмотрим равновесие кулачка 2 и рычага 3.
Запишем условия равновесия произвольной плоской системы сил, приложенных к кулачку:
Из первого уравнения заключаем: 
где ƒ – коэффициент трения между направляющими поверхностями кулачков и корпуса; P – усилие, передаваемое от рычага.
Отсюда:
 (21)
(21)
Далее запишем условия равновесия рычага:
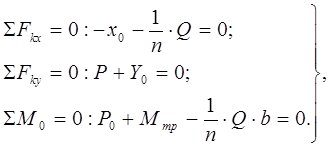 (22)
(22)
причем Мтр – это момент, создаваемый силой трения, действующей между осью и рычагом. Значение этого момента определим из предположения, что посадка рычага на ось производится с нулевым зазором и таким натягом. В этом случае:
 (23)
(23)
где ƒ – коэффициент трения по оси, d – диаметр оси. Последнее равенство заменим приближенным:
 (24)
(24)
Полученная при таком приближении суммарная ошибка крайне мала и к тому же “идет в запас”. Окончательно получаем из уравнения моментов:
 (25)
(25)

