 2015-06-11
2015-06-11 574
5741. Для САР электроприводов производственных механизмов, функциональные схемы которых приводятся на рисунках 1 и 2, выбрать математические модели отдельных элементов, согласно выданному преподавателем варианту по таблице 2.
2. Разработать структурную схему САР.
3. Разработать схему программного аналога САР на средствах пакета прикладных программ (ППП) МVТU. Параметры элементов САР, а также начальные условия, внешние воздействия, метод интегрирования и необходимые результаты, отображаемые в отчете по лабораторной работе, задаются в таблице 2.
4. Для заданных значений настроечных параметров САР (в базовой точке) провести имитационное моделирование и оценить критерии качества.
5. Ознакомиться с методом параметрическом оптимизации, описанном в разделе 3, и провести серию имитационных экспериментов с целью поиска настроечных параметров, улучшающих критерий качества по сравнению с его значением в базовой точке.
Примечание:
2. В имитационных экспериментах принять f(t) = MH ×1(t - t).
|
|
|
3. В точке с наилучшими значениями J2 провести дополнительно эксперимент с f(t) заданным в соответствии с вариантом из таблицы 2.
4. Предлагается два возможных варианта выполнения работы. Первый предполагает, что студент средствами ППП MVTU стоит программный аналог САР, второй предполагает, что студент берет готовый файл-заготовку САР и устанавливает в ней свои параметры.
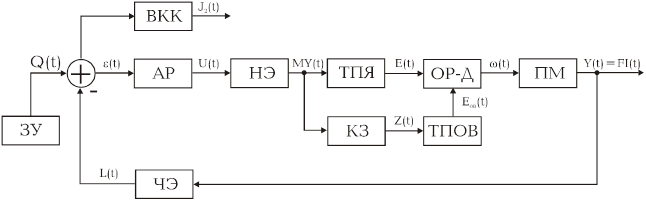 |
Рисунок 1. Функциональная схема САР скорости (CAP w).
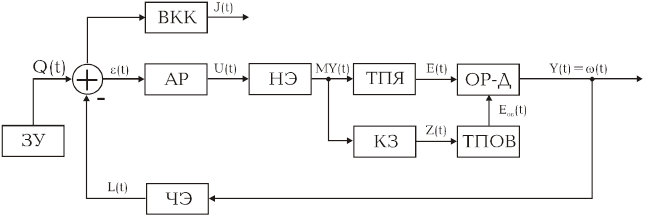 |
Рисунок 2. Функциональная схема САР положения (CAP FI).
На рисунках 1 и 2:
Д - двигатель постоянного тока;
ПМ - производственный механизм;
ОР-Д - объект регулирования - двигатель постоянного тока;
ТПЯ - тиристорный преобразователь якорной обмотки двигателя;
ТПОВ - тиристорный преобразователь обмотки возбуждения двигателя;
НЭ - нелинейный элемент;
АР - автоматический регулятор с типовым законом управления;
ЧЭ - чувствительный элемент (датчик);
ВКК - вычислитель критерия качества;
Y(t) - вектор координат пространства состояний объекта регулирования, Y(t) = {w(t), Iя(t), Мэл(t), FI(t), М(t)};
F(t) - вектор внешних возмущений, F(t)=Мт(t) - тормозной момент на валу двигателя;
Е(t) - напряжение на якорной обмотке двигателя;
МY(t), Z(t) - управляющие воздействия на входе ТПЯ и ТПОВ;
U(t)- управляющее воздействие на выходе АР;
Q(t) - задающее воздействие САР;
L(t) - сигнал обратной связи;
e(t) - ошибка рассогласования e(t) = Q(t) - L(t);
J2(t) - интегральная квадратичная оценка качества САР;
ЕОВ(t)- напряжение на обмотке возбуждения.








