 2015-06-04
2015-06-04 1115
1115Анализ развития современной элементной базы, существующих разработок показал, что важнейшим фактором ограничивающих сегодня повышение точности АЦП, является наличие динамических погрешностей второго рода. Динамические погрешности второго рода ограничивают общую погрешность преобразования на уровне существенно большем того уровня статической точности, которой удается достичь при применении современных высокоточных компонентов или компонентов средней точности с использованием их автоматической коррекции.
Таким образом, быстродействие АЦП и его точность оказываются связанными между собой и с характеристиками входного сигнала. Существует определенная взаимосвязь между статической и динамической точностью АЦП. Нет смысла добиваться статической точности выше уровня точности, который может быть обеспечен в динамическом режиме работы преобразователя, т. к. наличие динамической погрешности определенного уровня делает бессмысленным восприятие определенного числа младших разрядов выходного кода как не несущих полезной информации. Этот очевидный вывод привел к появлению различных методов компенсации динамических погрешностей.
Среди подобных методов, видимо особого внимания, должны заслуживать методы, позволяющие за счет одних и тех же принципов, проводить коррекцию как динамических, так и статических погрешностей преобразователей.
Анализ рассмотренных выше методов коррекции статических и динамических погрешностей ППАЦП позволяет сделать вывод что их, как раз и можно отнести к таким комплексным методам. Коррекция статических и динамических погрешностей ППАЦП может проводиться с использованием общих принципов, основанных на введении перекрытия шкал грубого и точного каналов преобразования. Очевидно, что величина перекрытия в ППАЦП для коррекции как статических погрешностей АЦП1 так и динамических погрешностей второго рода, должна выбираться такой, чтобы сумма весов АЦП2 превышала сумму указанных погрешностей.
Для этого необходимо уменьшить коэффициент усиления разностного усилителя КУ, по сравнению со значением рассчитываемым в соответствии с формулой (1) по крайней мере в w раз:
w = (gНОМ + δДИН МАХ + δИНСТР МАХ) / gНОМ.. (4)
С учетом того, что должно соблюдаться необходимое соотношение весов разрядов кодов N1 и N2, уменьшить коэффициент усиления разностного усилителя можно в число раз, равное 2k (k – целое число), минимально превышающее величину w. При этом k младших разрядов кода N1 и k старших разрядов кода N2 будут перекрываться по весам.
Как и при отдельном анализе влияния на работу ППАЦП статических погрешностей АЦП1 и изменений входного сигнала за время преобразования в (4) величина δИНСТР МАХ должна учитывать полный максимальный размах дифференциальных погрешностей АЦП1, а величина δДИН МАХ – полный возможный диапазон изменений входного напряжения за время работы АЦП1, ЦАП и вычитателя. Так же как и в предыдущих рассмотренных случаях для того чтобы разностный сигнал был всегда однополярным после выбора перекрытия на вход АЦП1 необходимо ввести постоянное смещение, которое привело бы к смещению диапазона усиленного разностного сигнала на половину шкалы АЦП2. Такое перекрытие шкал АЦП1 и АЦП2 и смещение шкалы АЦП1 позволят компенсировать теперь одновременно как статические инструментальные погрешности АЦП1 так и динамические погрешности, связанные с изменением входного сигнала за время кодирования ППАЦП.
В общем случае, количество перекрывающихся разрядов определяется исходя из априорной известности величины статических погрешностей грубого канала и динамических характеристик измеряемого сигнала. Однако часто обе характеристики или одна из них бывает неизвестна. При этом для получения наибольшей точности преобразования становится необходимым перестраивать работу устройства в ходе процесса измерения – проводить адаптацию канала измерений к его текущему состоянию и текущим характеристикам измеряемого сигнала. Это может осуществляться за счет изменения количества разрядов, перекрывающихся по весам.
Если разрядность грубого и точного каналов в процессе адаптации меняться не будут, а это с точки зрения технической реализации наиболее вероятно, то при увеличении числа перекрывающихся разрядов статическая точность преобразования уменьшается. И наоборот, с уменьшением числа перекрывающихся разрядов уменьшается динамическая точность. С этой точки зрения, очевидно, что в каждом конкретном случае для текущего момента времени, характеризующегося определенным состоянием канала и определенными характеристиками входного сигнала, можно выбрать оптимальную величину перекрытия, которая определит оптимальное соотношение статических и динамических погрешностей преобразования и сведет общую погрешность преобразования к минимуму. Применение того или иного метода оптимизации будет определяться способом оценки величины погрешности преобразования и объемом применяемого оборудования.
В простейшем случае число перекрывающихся разрядов первоначально задается для обеспечения компенсации лишь статических погрешностей грубого канала – это одно из предельных значений перекрытия. В дальнейшем по оценкам наличия динамических погрешностей количество перекрывающихся разрядов должно увеличиваться, пока не станет таким, чтобы обеспечить комплексную компенсацию общей погрешности преобразования на заданном уровне.
Рассмотрим применение данного подхода к ППАЦП. На рис. представлена структура устройства, функционирующего в соответствии с данным алгоритмом.
Представим в соответствии с изложенными подходами алгоритм работы ППАЦП, позволяющий структуре адаптироваться к статическим погрешностям грубого канала и динамическим характеристикам входного сигнала. В первоначальный момент времени коэффициент усиления разностного сигнала Ку устанавливается максимальным, т. е. таким чтобы обеспечить максимальную статическую точность – при этом шкалы АЦП1 и АЦП2 не перекрываются. Последовательность отсчетов АЦП2, соответствующие некоторым предельным кодам, будет свидетельствовать о том, что скорость изменения входного сигнала превысила ранее принятую оценку. При этом если измеряемый процесс стационарен, то имеется вероятность повторения подобных ситуаций и величину Ку необходимо уменьшать до тех пор, пока на достаточно представительной реализации перестанут появляться отсчеты АЦП2, выходящие за заданные пределы. При уменьшении Ку перекрытие шкал АЦП1 и АЦП2 будет увеличиваться.
На рис. 7 представлена структура устройства, функционирующего в соответствии с данным алгоритмом. В базовую схему ППАЦП дополнительно вводятся кодоуправляемый усилитель (КУУ), счетчик (СТ), запоминающее устройство (ЗУ), устройство сдвига кодов (УС). Выходной код СТ является адресным кодом ЗУ. В момент включения устройства выходной код счетчика СТ устанавливается в ноль. По этому адресу из ЗУ выводится код, устанавливающий коэффициент усиления КУУ в максимальное значение Ку. Если в каком-либо цикле преобразования возникает сигнал переполнения, значение кода, записанного в счетчике, увеличивается на единицу. При этом из ЗУ на КУУ подается код, который уменьшает его коэффициент усиления Ку в два раза. Это приведет к увеличению диапазона работы АЦП2 и исключит на известном уровне динамические погрешности ППАЦП. Увеличение диапазона работы АЦП2 в два раза приведет к появлению перекрытия на один разряд кодов N1 и N2. Для того чтобы правильно осуществить сложение этих кодов и получить выходной код ППАЦП код N2 сдвигается на один разряд с помощью УС.
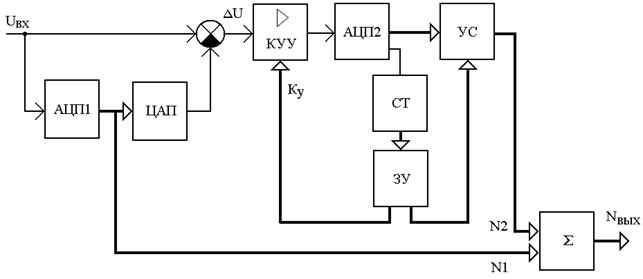
Р и с. 7. Структура адаптивного ППАЦП
Максимальное значение динамической погрешности всех последующих циклов преобразования для аналогичных изменений входного сигнала между моментами фиксации кодов АЦП1 и АЦП2, таким образом, уменьшается. Если динамическая погрешность появится вновь, код счетчика опять увеличится на единицу и опять соответствующим образом уменьшится Ку, а код N2 будет сдвигаться на еще один разряд. Каждый раз при этом статическая погрешность преобразования будет увеличиваться, но полная погрешность преобразования ППАЦП будет уменьшаться ввиду более полной компенсации динамических погрешностей.
Недостатком представленной структуры является невозможность точной оптимизации соотношения между статическими и динамическими погрешностями преобразования для конкретного вида входного сигнала из-за большой дискретности допустимых значений коэффициента усиления Ку. Дискретность выбора Ку в рассматриваемых выше структурах определяется тем, что коды N1 и N2 должны суммироваться так, чтобы складывались разряды с одинаковым весом.
На рис. 7 представлена структура устройства лишенная этого недостатка. Ку в ней при обнаружении факта появления динамической погрешности меняется плавно – т. е. с небольшим шагом. При этом изменения передаточной характеристики ППАЦП, связанные с уменьшением Ку, могут быть скорректированы аналогичным увеличением кода N2 с выходов АЦП2 в цифровом умножителе УМН.
Через некоторое время после начала измерений установится оптимальное для данного входного сигнала значение коэффициента усиления Ку, исключающее динамическую погрешность всех дальнейших измерений.
Очевидно, что изменение Ку в этом случае может более строго соответствовать динамическим характеристикам входного сигнала и статическим погрешностям грубого канала. Кроме всего прочего в этой структуре диапазон разностного сигнала будет постоянно максимально соответствовать диапазону работы АЦП2. За счет этого будет минимизироваться степень влияния инструментальных погрешностей АЦП2 на точность функции преобразования ППАЦП. Разрядность выходного кода умножителя УМН выбирается исходя из обеспечения максимально возможного перекрытия кодов N1 и N2, выбираемого априорно исходя из максимально ожидаемых динамических погрешностей и погрешностей грубого канала.
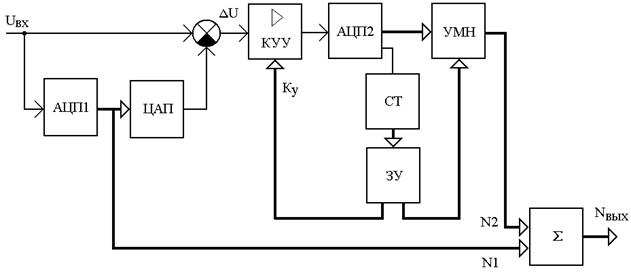
Р и с. 7. Структура адаптивного ППАЦП с возможностью плавного изменения Ку
Если характеристики сигнала изменчивы, можно постоянно отслеживать его динамику, оценивая среднеквадратическое отклонение сигнала (его дисперсию) на входе разностного усилителя. Количество циклов преобразования, в течение которых должна производиться оценка дисперсии сигнала на входе разностного усилителя определяется с одной стороны из условия достаточности статистической выборки, с другой стороны исходя из характеристик изменчивости измеряемого нестационарного процесса.








