 2015-07-04
2015-07-04 1829
1829Функциональная схема ЛЭ состоит из трёх частей (рис. 2.18):
1) логическая часть, предназначенная для выполнения заданной логической операции;
2) усилительная часть, которая усиливает полученный сигнал до нужного уровня;
3) формирующая (выходная) часть, обеспечивающая формирование потенциальных уровней или импульсов с требуемыми параметрами (например, крутизна).
Идеальная модель ЛЭ учитывает только выполняемую им логическую операцию. Такую модель ЛЭ можно изобразить просто в виде его УГО (рис. 2.17).
На практике быстродействие или даже работоспособность цифровых устройств (ЦУ) зависит от задержек сигналов в ЛЭ и линиях связи между ними. Реальные переходные процессы в ЛЭ достаточно сложны, и в моделях они отображаются с той или иной степенью упрощения.
В простейшей идеализированной модели динамические свойства ЛЭ отражаются введением в его выходную цепь элемента задержки сигнала на фиксированное время задержки t з (рис. 2.19).
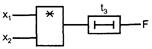
Рис. 2.19. Идеализированная модель ЛЭ с фиксированной задержкой
В силу простоты такая модель находит применение на практике, несмотря на то, что она является грубой и не учитывает ряд существенных факторов: технологического разброса задержек элементов, зависимости их от направления переключения элемента (из “0” в “1” или из “1” в “0”), зависимости их от ёмкостной нагрузки, которая может быть резко выраженной (например, для элементов технологии КМОП задержка пропорциональна ёмкости нагрузки) и т. д. Эта простейшая модель не учитывает также фильтрующих свойств реальных элементов, благодаря которым короткие входные импульсы, обладающие малой энергией, не способны вызвать переключение элемента, даже если их амплитуда велика.
Более сложные модели ЛЭ с применением более точных моделей сигналов и задержек сопровождается усложнением расчётов при анализе работы ЦУ и обычно характерно для САПР.
Пользуясь для описания сигналов алфавитом всего из двух символов {0, 1}, нельзя, естественно, точно описать форму сигнала, т. к. в этом случае он может быть представлен только в виде идеальных прямоугольных импульсов (рис. 7, а), тогда как реальные сигналы обязательно имеют интервалы переходных процессов при переключениях в направлениях 0 →1 и 1 → 0 (рис. 7, б). Если для упрощения линеаризовать участки переходных процессов, то сигналы можно представлять в форме трапеций (рис. 7, в).
Для сигналов с областями переходных процессов алфавит,т. е. число символов, используемых для описания формы сигнала, расширится по меньшей мере до трёх: {0, 1, X }, где X обозначает неопределённое состояние во время переходного процесса.
Часто к тройке {0, 1, X } добавляется четвёртый символ Z, отображающий присущий некоторым элементам режим “ отключено ” или, иначе, режим “ высокого импеданса ” (Z-состояние). Такой четырёхсимвольный алфавит {0, 1, Х, Z } применяется в ряде САПР.
Для правильного представления режимов в схемах с источниками сигналов, имеющих существенно различные выходные сопротивления, вводится понятие силы сигнала, благодаря которому можно определить сигнал в точках соединения выходов, обладающих разной силой.
Вводя в четырёхсимвольный алфавит символы слабого нуля L, слабой единицы Н и слабого неопределённого состояния W, приходят к семи символам в составе алфавита {0, 1, Х, Z, L, H, W }.
Добавив ещё два символа (“ не инициализировано ” и “ не важно ”), необходимые для организации процесса моделирования работы функционально-логической схемы устройства, получают часто применяемый девятисимвольный алфавит. В некоторых случаях задачи правильного отображения сигналов решаются путём представления элемента задержки в виде цепочки нескольких динамических звеньев, каждое из которых отображает то или иное существенное свойство элемента с точки зрения динамики его поведения.
Расширение алфавита при описании сигналов позволяет приближать модельное описание процессов в цифровых схемах к реальным. В то же время усложнение моделей существенно увеличивает время моделирования и объём проводимых в его ходе вычислений. Поэтому в системах моделирования на разных этапах работы могут применяться модели сигналов разной сложности – простые для быстрого неточного моделирования и более сложные с расширенными алфавитами для более адекватного описания процессов в схемах.
Рассмотрение множества вариантов описания цифровых сигналов не входит в задачи этого параграфа, но о некоторых моментах стоит упомянуть. Цель усложнения моделей элементов – более точное отображение временных соотношений сигналов в анализируемой схеме, выявление возможных временных состязаний. В этом направлении важным достижением явилось предложенное Эйхельбергером троичное моделирование, выявляющее критические временные состязания для схем с произвольным соотношением задержек в элементах схемы. Поскольку реально задержки находятся в определённых пределах, а не в интервале от нуля до бесконечности, метод Эйхельбергера даёт слишком пессимистические результаты и обнаруживает критические временные состязания в том числе и там, где фактически их не будет. Для устранения отмеченного недостатка были разработаны методы Δ -троичного моделирования, троичного моделирования с нарастающей неопределённостью и т. д. Для троичного моделирования по Эйхельбергеру используется алфавит {0, X, 1}, где X – неопределённое значение сигнала на интервале переходных процессов переключения элемента. Операции ИЛИ, И и НЕ троичной алгебры реализуются при этом согласно соотношениям, приведенным ниже:













Для других операций троичной алгебры также существуют соотношения, выражаемые через обычные операции логического сложения, умножения и инверсии.
Приближённое к реальности описание сигналов дают средства аналогового моделирования процессов в ЛЭ, использующие аппарат дифференциальных уравнений (например, известная программа SPICE), но объём вычислений при этом настолько возрастает, что подобное моделирование применяется для проектирования электрических схем уровня отдельных элементов или несложных фрагментов.

