 2015-07-02
2015-07-02 916
916В качестве объектов, для которых производится расчет электропривода, обычно выбираются механизмы циклического действия. Это механизмы с интенсивным режимом работы, тахограммы которых содержат участки пуска, электрического торможения и работы с несколькими значениями установившейся скорости. Электроприводы таких механизмов работают в повторно-кратковременном или перемежающемся режиме, что в соответствии с классификацией режимов работы двигателя по нагреванию соответствует режимам S 3- S 8.
В нагрузочных диаграммах электроприводов указанного типа существенную долю составляют динамические моменты, обусловленные изменением скорости электропривода, следовательно, и на нагрев двигателя эти составляющие момента оказывают значительное влияние.
Упрощенная типовая тахограмма механизма, работающего в повторно-кратковременном режиме, показана на рис. 4.1.
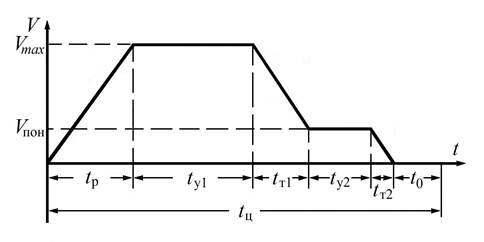
Рис. 4.1
Для определения отрезков пути и времени работы на отдельных участках тахограммы в исходных данных задается (или на основании исходных данных рассчитывается): t Ц – время цикла, с; S – расчетный путь перемещения, м; Vmax – максимальная скорость, м/с (обычно ей соответствует номинальная скорость двигателя wN, рад/с); V ПОН – пониженная скорость, м/с; D S – путь, проходимый на пониженной скорости, м. Предполагается, что на участках разгона и торможения (кроме специально оговоренных случаев) имеет место равномерно ускоренное (равномерно замедленное) движение и задается постоянное значение а – ускорения, м / с2; b – замедления, м / с2 . (Как правило, а = b.) В ряде случаев может быть задано или рассчитано требуемое время разгона t Р, торможения t Т , время работы на отдельных участках с установившейся скоростью.
На основе указанных исходных данных определяются:
время разгона
 (4.1)
(4.1)
где V НАЧ и V КОН – скорость в начале и в конце переходного процесса, м/с;
путь, проходимый при разгоне
 (4.2)
(4.2)
время торможения
 (4.3)
(4.3)
путь, проходимый на отрезке торможения,
 (4.4)
(4.4)
время работы на участке с пониженной скоростью
 (4.5)
(4.5)
время торможения с пониженной скорости
 (4.6)
(4.6)
путь, проходимый на отрезке торможения t Т2,
 (4.7)
(4.7)
путь, проходимый при работе с установившейся скоростью
S У1 = S – S Р –S Т1 – S Т2 – D S; (4.8)
время работы на участке с установившейся скоростью
 (4.9)
(4.9)
время паузы
t 0 = t Ц – t Р – t Т1 – t Т2 – t У1 – t У2. (4.10)
Укажем, что вместо времени цикла может быть задано число включений в час электропривода (Z), тогда
t Ц = 3600/ Z, (4.11)
а вместо значения пониженной скорости – требуемая точность позиционирования (DQ, м) для электроприводов, отрабатывающих заданные перемещения, тогда значение V ПОН определяется следующим образом:
 (4.12)
(4.12)
Если возникает необходимость рассчитывать угол поворота вала двигателя при отработке заданного перемещения S, то можно воспользоваться следующими расчетными соотношениями:
угловое ускорение электродвигателя при разгоне, рад / с2,
 (4.13)
(4.13)
где wНАЧ и wКОН – угловая скорость двигателя в начале и в конце переходного процесса, рад/с;
угловое замедление электропривода при торможении, рад/с2,
 (4.14)
(4.14)
угол, проходимый при разгоне, рад,
 (4.15)
(4.15)
угол, проходимый при торможении на участках t Т1и t Т2, рад,
 (4.16)
(4.16)
пониженная угловая скорость двигателя wПОН, соответствующая скорости V ПОН,
 (4.17)
(4.17)
угол, проходимый на участке работы с номинальной скоростью, рад,
 (4.18)
(4.18)
угол, проходимый на участке работы с пониженной скоростью, рад,
 (4.19)
(4.19)
суммарный угол поворота вала двигателя (в радианах) при отработке заданного перемещения S
a = a Р + a У1 + a У2 + a Т; (4.20)
число оборотов вала двигателя при отработке заданного перемещения S
 (4.21)
(4.21)
Конкретная тахограмма может отличаться от приведенной на рис. 1. В частности, цикл работы электропривода может состоять из нескольких тахограмм, показанных на рис. 1 (например, при перемещении механизма в разных направлениях). В каждой тахограмме может быть несколько участков работы с различными значениями пониженной скорости, скорость на некоторых участках может быть выше номинальной скорости, скорость на других участках может быть ниже номинальной и т. д. Однако приведенные расчетные выражения позволяют определить времена и отрезки пути при работе на отдельных участках тахограммы, форма которой отличается от показанной на рис. 4.1.
По изложенным далее методикам определяются статические моменты нагрузки и моменты инерции механизма и строится диаграмма статических моментов.
После предварительного выбора мощности и типа двигателя (общие положения изложены в [1, 2], а справочные данные по некоторым типам двигателей приведены в [3]) производится расчет передаточного числа редуктора, приведение статических моментов и моментов инерции к валу двигателя, расчет (при известной тахограмме механизма и двигателя) динамических моментов электропривода и построение нагрузочных диаграмм электропривода.
Методики проверки выбранного электродвигателя по нагреванию и перегрузке изложены в [1, 2].
При расчетах систем электропривода предполагается, что электрооборудование эксплуатируется на высоте не более 800 м над уровнем моря в условиях умеренного климата в сухом отапливаемом помещении (климатические условия и категория размещения У4 или УХЛ4 по ГОСТ 15150-69), при отсутствии в атмосфере токопроводящей пыли и коррозионно-активных веществ, а также при практическом отсутствии вибрационных нагрузок (группа эксплуатации Ml по ГОСТ 17516–70), степень защищенности электрооборудования и электродвигателей от внешних воздействий должна быть не менее чем 1Р23 по ГОСТ 14294–72, 14494–72. Если условии отличаются от перечисленных, то это указывается в задании.








