 2015-08-13
2015-08-13 4047
4047Балансировочный станок по существу является измерителем колебаний механической системы, связанной с ротором, по характеристикам которых судят о неуравновешенности ротора. Некоторые станки могут иметь встроенные приспособления для корректировки масс ротора.
При серийном и массовом производстве операции определения и уменьшения дисбалансов могут совмещаться, т.е. измерения дисбалансов ротора и корректировка его масс проводятся одновременно.
По характеру режима работы и конструктивному исполнению различают балансировочные станки дорезонансного, резонансного и зарезонансного типа.
У дорезонансного балансировочного станка частота вращения при балансировке ниже наименьшей собственной частоты колебаний системы, состоящей из балансируемого ротора и паразитной массы, которая включает в себя часть массы станка, участвующей в колебаниях при возбуждении их неуравновешенными силами ротора.
У резонансного балансировочного станка частота вращения при установившемся режиме балансировки равна собственной частоте колебаний системы, состоящей из ротора и уравновешивающей массы. Сюда же относят и станки с балансировкой при проходе через резонансный режим. Станки с проходом через резонанс наиболее просты, имеют простой привод и допускают замер амплитуд колебаний простыми приборами, но имеют неопределенные характеристики при проходе через резонансный режим, что снижает точность балансировки.
Станки с работой на резонансном режиме более чувствительны, но требуют применения сложного привода, чтобы строго поддерживать этот режим.
В зарезонансном балансировочном станке при балансировке обеспечивается частота вращения ротора выше наибольшей собственной частоты колебаний роторной системы вместе с уравновешивающей массой.
Станки этого типа, как и дорезонансные, не имеют проблем в поддержании устойчивого движения и имеют простые приводы. Однако малые значения амплитуд колебаний в зарезонансном режиме требуют применения высокочувствительных приборов для измерения амплитуд.
Механические системы балансировочных станков классифицируют по числу степеней свободы ротора, а также по числу степеней свободы оси ротора вместе с подвижной частью станка.
В классификации по числу степеней свободы ротора механические системы распределены по семи классам (рис).
Номер класса (римская цифра) соответствует числу степеней свободы жесткого ротора. Кроме того, введен дополнительный признак разделения механических систем на две группы: буквой А обозначены станки, имеющие раму, на которой размещены опоры ротора, а буквой В - станки с отдельными опорами, установленными на неподвижном основании. Это подразделение характеризует не только конструктивные особенности системы, но и особенности балансировочного процесса, так как в станках группы А выбор точек для измерения колебаний менее ограничен, чем в группе В.
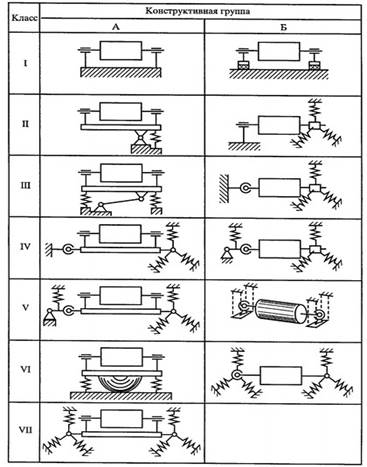
Рис. - Классификация механических систем балансировочных станков по числу степеней свободы ротора
Системы классов IVB, VA, VIA и VIB промышленного применения не получили.
Системы ША, ШВ и IVA применяются в некоторых станках, выпускаемых фирмами Hofmann-Kunze, General Motors Corp. и General Electrik Co.
Широко применяются системы классов:
IA - в станках для статической балансировки; IB - в балансировочных станках типа МДУ, ДБН, МДУС отечественного производства и в станках типа UA, ИА, ИАГ фирмы Losenhausenwerk; IIA - в отечественных станках М-40, М-48, МДБГ-1, УУГ-3 и станках фирм Tinius-Olsen и Giesler типа G2; ПВ - в станках конструкции МИИТ и фирм Bear, Bentrath и Losenhausenwerk; VB - в отечественных станках типа ДИСБАЛАНС, МС, МДБ, 9703, 9710, 9739 разных модификаций и станках фирм Reitlinger, K.Schenk, Hofmann (серий R, AM, VGW, E фирм Gisholt (типа HS) и Dynagraph (типа М), фирмы Eriksson (типа URB}, Jackson Bradwell Ltd, Dawe Instrum. Ltd и EMJ и серии ВНЕ; VIIA - в станках конструкции МВТУ, а также в станках фирм Sperry Strobodyn) и Hermann.
В классификации по числу степеней свободы оси ротора станки делят на четыре группы (рис.).
Группа 1 с неподвижной осью ротора (см. рис.) соответствует классам IA и 1Б (одна степень свободы). Станки этой группы (ДБН-50, МДУ-3) имеют жесткую связь оси ротора массы т через неподвижные подшипники с неизмеримо большей массой фундамента тф. Дисбалансы ротора определяют по измерениям реакций опор, распределение которых обусловлено только положением центра масс относительно опор или плоскостей измерения. Отсутствие подвижных частей позволяет упростить конструкцию опор и применять осевой привод ротора. В качестве массы тф при средних и тяжелых роторах используют неподвижное основание (пол помещения или фундамент), колебания которого вызывают в измерительном элементе широкий спектр помех и для их подавления нужна более эффективная фильтрация, чем в системах с упругими связями с внешней средой. Виброизоляция с помощью мягкой подвески станка нарушает неподвижность подшипников, лишая систему возможности настройки без применения тарировочного ротора. Виброизоляция фундамента без нарушения соотношения сил возможна только для малых роторов, когда установленная на пружинах плита основания массой в несколько килограммов значительно превышает массу ротора.
Работа станка возможна только на частоте вращения, значительно меньшей собственной частоты системы (в дорезонансном режиме), когда угол сдвига фаз практически равен нулю, что снижает ошибки измерения дисбаланса. Вызванные дисбалансом силы пропорциональны, поэтому целесообразно применять в этих станках высокие скорости. Высокий уровень собственных частот системы и ее частей делает ее чувствительной к ударным помехам, демпфирование которых затруднительно.
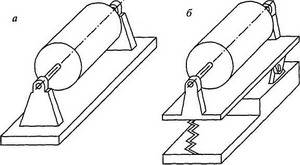
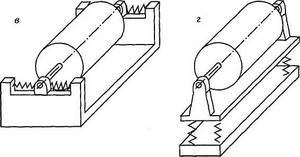
Рис. - Классификация механических систем балансировочных станков по числу степеней свободы оси ротора
Группа 2 (см. рис. 1, б) с фиксированной осью колебаний оси ротора (две степени свободы) соответствует классу ПБ. Станки группы 2 (М-40, МДБГ-1) имеют жесткую связь колеблющейся системы (рамы) с основанием в направлении, перпендикулярном оси колебаний системы, и работают при резонансном режиме с большими угловыми колебаниями рамы, что удобно для измерений, но требует применения специального привода для обеспечения постоянной частоты вращения ротора. Высокая добротность колебательной системы ослабляет помехи иных частот. Поэтому станки в резонансном режиме по возможности обнаружения дисбаланса сравнимы со станками, оборудованными электронной измерительной системой. Способы балансировки на таких станках основаны на поочередном определении дисбаланса ротора в двух плоскостях коррекции, каждая из которых поочередно совмещается с фиксированной осью колебаний рамы.
Внешние вибрации, перпендикулярные фиксированной оси и оси вращения ротора, могут налагаться на измеряемые и ограничивать минимальную величину определяемого дисбаланса. Поэтому эксплуатировать такие станки целесообразно в помещениях с низким уровнем внешних вибраций. При балансировке средних и крупных роторов станок монтируют на изолированном фундаменте, а станок для малых роторов устанавливают на плите с мягкой подвеской.
Станки группы 2 с балансировкой на выбеге редко применяют из-за низкой производительности, требующей нескольких пусков для каждой плоскости коррекции. При этом для балансировки на выбеге ротор должен иметь достаточно большой момент инерции масс относительно оси вращения, а также малые и стабильные потери на трение в подшипниках. Иначе при быстром проходе через резонанс амплитуды колебаний не достигнут достаточной величины, а нестабильность потерь на трение приведет к разбросу величин амплитуд при разных пусках. На таких станках сложно балансировать длинные роторы в собственных опорах.
Станки группы 2 удобны при балансировке роторов различных размеров и масс в экспериментальном и мелкосерийном производстве и при ремонтных работах, что определяется простотой их переналадки, состоящей в соответствующей установке ротора относительно оси качания рамы. Работающие в зарезонансном режиме и оборудованные электрическими датчиками с усилителями станки с фиксированной осью колебаний широко применяются для балансировки роторов гироскопов.
Группа 3 (см. рис. 1, в) с фиксированной плоскостью колебаний оси ротора (три степени свободы) соответствует классу VB (станки ДБ, 9703, 9710), наиболее широко распространена, что объясняется возможностью определения дисбалансов ротора в двух плоскостях коррекции по колебаниям опор за один пуск без перестановки ротора. Для сохранения линейности колебаний системы, позволяющей суммировать их алгебраически, станки работают в зарезонансном режиме с малыми амплитудами колебаний








