 2015-08-21
2015-08-21 1163
1163Кинематическая схема станка (рисунок 1.3) состоит из четырех кинематических цепей:
1)вращения шпинделя;
2)движения подач;
3)вертикального перемещения рукава;
4)перемещения сверлильной головки по рукаву.
Шпиндель получает вращение от электродвигателя через промежуточную передачу, пусковую фрикционную муфту и коробку скоростей с четырьмя передвижными зубчатыми блоками. Промежуточная передача обеспечивает определенное число оборотов вала фрикционной муфты в различных исполнениях станка. Фрикционная муфта соединяется с коробкой скоростей либо с двойчаткой 9-10, либо через паразитную шестерню 8, неподвижно закрепленную шестерню 13. В последнем случае коробка скоростей получает обратное вращение, т. е. шпиндель вращается против часовой стрелки. Таким образом, каждым двум ступеням оборотов шпинделя в направлении по часовой стрелке соответствует одна ступень оборотов против часовой стрелки.
Передвижные блоки коробки скоростей (три двойных и один тройной) обеспечивают получение 24 ступеней оборотов шпинделя. Структурный график построен таким образом, что три ступени чисел оборотов перекрываются, а остальные 21 образуют геометрический ряд с j=1,26 в интервале от 20 до 2000 об/мин.
Двойной блок на гильзе шпинделя имеет также третье положение, когда обе шестерни выведены из зацепления. При этом шпиндель легко проворачивается от руки.
Коробка подач получает вращение от шпинделя через шестерни 25-26. Один тройной и два двойных блока обеспечивают получение 12 подач, образующих геометрический ряд с j=1,41 в интервале от 0,056 до 2,5 мм/об.
Последний вал коробки подач шлицевой муфтой связан с вертикальным валом механизма подач, несущим на себе специальную регулируемую муфту. Муфта обеспечивает размыкание цепи подач при достижении предельного усилия подачи при резании либо на жестком упоре, размыкание цепи тонкой ручной подачи при включении механической подачи и включение тонкой ручной подачи при срабатывании перегрузочного устройства. Зубчатая муфта перегрузочного устройства С соединена с червяком 43, который через червячное колесо 42 с помощью штурвального устройства А соединяется с реечной шестерней 41, находящейся в зацеплении с рейкой 40 пиноли шпинделя.
Грубая ручная подача осуществляется вращением реечного вала 41 с помощью штурвальных рукояток А. Тонкая ручная подача осуществляется вращением маховичка В.
Перемещение головки по рукаву осуществляется с помощью маховика, сидящего на валу, проходящем через отверстие реечного вала подачи. На другом конце вала имеется шестерня 46, которая через накидную шестерню 47 соединяется с рейкой 61, неподвижно укрепленной на рукаве.
Условные обозначения: С – зубчатые муфты; Д – механизм включения подачи; F – зажим головки; Е – привод гидроселектора.
Вертикальное перемещение рукава производится отдельным электродвигателем через редуктор 56, 55, 58, 57, укрепленный на верхней части колонны, винт подъема 59 и гайку 60, расположенную в рукаве.
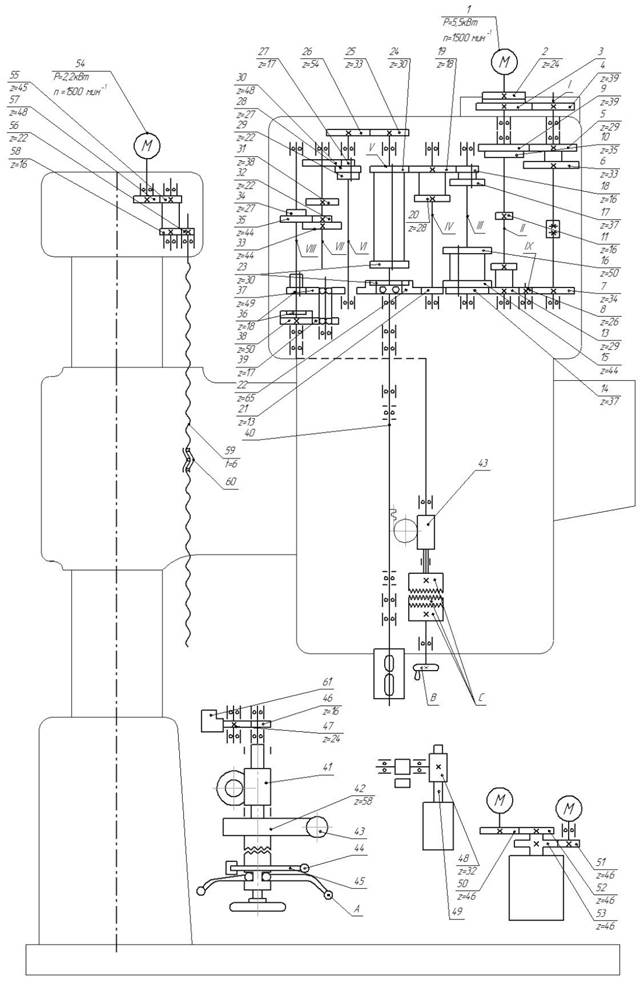
Рисунок 1.3 – Кинематическая схема станка
Изменение направления перемещения рукава производится реверсированием двигателя. В цепи привода механизма подъема установлена кулачковая предохранительная муфта, которая срабатывает при увеличении сопротивления" перемещению рукава.








