 2015-08-21
2015-08-21 465
465Якщо положення системи в будь-який момент часу може бути описано єдиним параметром, то система має один ступінь свободи. Прикладами таких систем є: маятник, що коливається в заданій площині (рис.1.1), маса, пов'язана з пружиною (рис. 1.2),
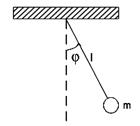 |
Рисунок 1.1 – Математичний маятник
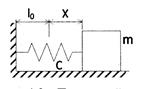 |
Рисунок 1.2 – Пружинний маятник
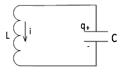 |
Рисунок 1.3 – Коливальний контур
або електричний контур (рис.1.3), де єдиний параметр (узагальнена координата  ): φ – кут відхилення,
): φ – кут відхилення,  - зміщення вантажу, заряд на пластинах конденсатора (або
- зміщення вантажу, заряд на пластинах конденсатора (або  - струм в котушці) відповідно.
- струм в котушці) відповідно.
Для визначеності розглянемо рух маятника. Рівняння руху його запишеться у вигляді
 (1.1)
(1.1)
і являє собою нелінійне диференціальне рівняння. Зазвичай нелінійні диференціальні рівняння в аналітичній формі вирішуються важко. Більше того, вони не мають властивості суперпозиції.








