 2015-10-22
2015-10-22 1353
1353Эффективность управления процессом расформирования и формирования поездов в конечном итоге зависит от качества принимаемых ДСЦ и ДСПГ решений.
Существует много методик оценки профессиональной пригодности различных категорий работников. Это оценка их действий на тренажерах, тестирование, психо-физиологические методы и др.
Для категорий работников, к которым относятся ДСЦ и ДСПГ, наиболее эффективной является методика количественной оценки сложности принимаемых решений на основе исследования алгоритмов их действий
в реальных условиях технологического процесса.
Количественная оценка загрузки и сложности работы ОЗ основана на формализации действий человека, регламентируемых должностными
инструкциями, указаниями, технико-распорядительными актами СС и др.
Формализованное представление предусматривает построение алгоритмов реализации сенсорных, моторных и логических операций («да – нет»).
Для этого вводятся обозначения действий и логических условий, которые выполняет и оценивает человек.
|
|
|
Например, А – оценка ситуации завершения накопления вагонов
на конкретном пути; α1 – логическое условие завершения накопления состава с исходами «да – нет»; B – выбор пути, на котором в первую очередь необходимо произвести осаживание вагонов; α2, α3, α4, α5, α6, α7 и т.д. – логические условия оценки необходимости осаживания вагонов на 1-м, 2-м, 3-м и т.д. путях.
 Последовательность действий и логических условий структурируется в виде структурно-логического алгоритма, представленного на рис. 2.10.
Последовательность действий и логических условий структурируется в виде структурно-логического алгоритма, представленного на рис. 2.10.
Рис. 2.10. Структурно-логическая форма алгоритма действий ОЗ
Из рис. 2.10 видно, что переход от А к С требует оценки только одного логического условия (α1), а от В к KMN – 4-х логических условий (α3, α4, α5, α6). От момента обнаружения нагона (или запуска) отцепа до принятия решения – на какой путь направить «чужак» – в течение 2 – 3 сек ДСПГ может потребоваться оценить до 12 и более логических условий.
Логическая сложность принятия решения может сильно различаться в зависимости от конкретной оперативно-технологической ситуации.
Структурно-логическая форма алгоритмов принятия решений должна в самой максимальной степени учитывать все возможные ситуации
и исходы, полученные экспертным путем.
Конечная цель исследования таких «идеальных» алгоритмов состоит в том, чтобы выявить набор действий и логических условий, которые
человек не в состоянии выполнить или оценить из-за отсутствия времени
и передать их автомату.
Количественная оценка показателей сложности реализации таких
алгоритмов предполагает следующие этапы.
|
|
|
1. Составляется таблица полного перечня источников информации Ni, – так называемого рабочего алфавита ОЗ, устанавливается перечень сигналов от каждого источника Si,Ni (монитор АРМа, табло коллективного пользования, индикаторы скоростей, парк, путь, спускная часть СГ и др.). Для получения величины средней информации  определяется частота nSiNi или вероятность PSiNi появления каждого сигнала.
определяется частота nSiNi или вероятность PSiNi появления каждого сигнала.
 Мера неопределённости (энтропия) при восприятии всех сигналов рассчитывается по формуле:
Мера неопределённости (энтропия) при восприятии всех сигналов рассчитывается по формуле:
дв. ед., (2.15)
 где n – общее количество источников информации;
где n – общее количество источников информации;
– количество информации от Ni -го источника.
Величина  – объективная информационная характеристика анализируемой системы, по которой оценивают количество сигналов информации, темп их поступления (распределения) во времени, число оперативных сигналов, их насыщение информацией и оптимальность кодирования.
– объективная информационная характеристика анализируемой системы, по которой оценивают количество сигналов информации, темп их поступления (распределения) во времени, число оперативных сигналов, их насыщение информацией и оптимальность кодирования.
Располагая количественными значениями для отдельных источников или групп источников информации, представляется возможным выделить из них наиболее важные, значимые и информативные.
 2 Так как имеется дефицит времени, то сложность работы ОЗ учитывается его «пропускной способностью»:
2 Так как имеется дефицит времени, то сложность работы ОЗ учитывается его «пропускной способностью»:
, (2.16)

 где – время переработки информации;
где – время переработки информации;
– количество переработанной информации.
3 Величина С, зависящая от способов восприятия, переработки и хранения информации, связана с показателем загрузки памяти, которая определяется числом запоминаемых и удерживаемых в памяти различных оперативно-технологических ситуаций на СС, включая СГ, парки, горловины и др. К числу таких, удерживаемых в памяти ситуаций, можно отнести: местонахождение «чужаков», специальных вагонов, локомотивов;
необходимость изъятия вагонов, осаживания; переполнение путей и отсутствие проходов; изменение специализации путей; готовность состава
по весу и длине; пути, куда запрещён роспуск, и др.
 Показатель загрузки памяти Кn определяется с использованием формулы:
Показатель загрузки памяти Кn определяется с использованием формулы:
усл.ед., (2.17)
где Sj – число информационных признаков (j =1, 2, 3,..., n), удерживаемых памятью человека в каждой ситуации (при числе ситуаций i = 1, 2, 3,..., n);
pj – частота появления необходимости запоминания каждой
ситуации.
Экспериментальным путём установлено, что допустимое значение Кn не превышает значения 0,9 усл. ед. На графике (рис. 2.11) представлена зависимость Kn = f(Nсит), где Nсит – число фактически возникающих оперативно-технологических ситуаций, которые необходимо ДСЦ или ДСПГ удерживать в памяти.
Из графика следует, что при допустимом значении Кn = 0,9 усл. ед. максимально допустимое число запоминаемых ситуаций составляет не более 8.
 Пример. Расчет показателей Кn для конкретных условий СГ. В сложившейся ситуации в подгорочном парке ДСПГ запомнил: на 15-м и 31-м путях имеются «чужаки»; на 24-м пути находится локомотив; на 12-м, 34-м и 41-м путях требуется осаживание вагонов; на 13-м и 14-м пути нет проходов; с 16-го пути необходима перестановка трех вагонов на 32-й путь. ДСПГ должен запомнить несколько ситуаций различной сложности.
Пример. Расчет показателей Кn для конкретных условий СГ. В сложившейся ситуации в подгорочном парке ДСПГ запомнил: на 15-м и 31-м путях имеются «чужаки»; на 24-м пути находится локомотив; на 12-м, 34-м и 41-м путях требуется осаживание вагонов; на 13-м и 14-м пути нет проходов; с 16-го пути необходима перестановка трех вагонов на 32-й путь. ДСПГ должен запомнить несколько ситуаций различной сложности.
Тогда усл. ед. загрузки памяти. Из этого следует, что ДСПГ необходима поддержка АРМa, на мониторе которого должны автоматически отображаться оперативно-технологические ситуации на СГ и в подгорочном парке.
 После количественной оценки загрузки памяти в различные периоды смены Кn1 , Кn2,..., К
После количественной оценки загрузки памяти в различные периоды смены Кn1 , Кn2,..., К  дается сравнительный анализ сложности работы ОЗ в эти периоды и устанавливаются критичные значения показателей Кn.
дается сравнительный анализ сложности работы ОЗ в эти периоды и устанавливаются критичные значения показателей Кn.

Рис. 2.11. Зависимость показателя загрузка памяти от числа
запоминаемых ситуаций
 4 Так как в деятельности ДСЦ и ДСПГ имеются специфичные для СС ситуации, связанные с высокой динамичностью процесса, дефицитом времени, сложностью обстановки при одновременном накоплении относительно большого количества составов, то показатели алгоритмического анализа дополняются специальными критериями надежности и напряженности работы. По показателю относительной временной загрузки h оценивается надежность ОЗ по временным параметрам:
4 Так как в деятельности ДСЦ и ДСПГ имеются специфичные для СС ситуации, связанные с высокой динамичностью процесса, дефицитом времени, сложностью обстановки при одновременном накоплении относительно большого количества составов, то показатели алгоритмического анализа дополняются специальными критериями надежности и напряженности работы. По показателю относительной временной загрузки h оценивается надежность ОЗ по временным параметрам:
|
|
|
относ. ед., (2.18)
где t 1, t 2, t 3 – затраты времени соответственно на восприятие информации, первичную оценку и переработку полученной информации (показание мониторов, индикация пульта, ситуации в парках и на спускной части горки, сообщения по телефону, принятие решения и др.);
 – затраты времени на группу исполнительных действий, выполняемых после принятия решения;
– затраты времени на группу исполнительных действий, выполняемых после принятия решения;
Т – продолжительность процесса (величина, задаваемая конкретной ситуацией).
 При условии надежности ОЗ в системе принимается соотношение
При условии надежности ОЗ в системе принимается соотношение
сек., (2.19)
Если величина h > 1, то ОЗ системы оказывается ненадежным.
В подтверждение этого на рис. 2.12 приведены зависимости показателя относительной временной загрузки h от темпа роспуска составов (скоростей надвига 3, 5, 7 и 8 км/час) и дробности отцепов К др. Здесь
экспериментально установлено, что при скоростях 7 км/час и более и при К др > 80 % ДСПГ становится звеном ненадежным, требующим интеллектуальной поддержки при высоких темпах роспуска и возникновении нагонов на спускной части горки.

Рис. 2.12. Зависимости загрузки ДСПГ от темпа роспуска
6 Для оценки степени напряженности работы ДСПГ, обусловленной темпом роспуска, скоростью надвига составов, плотностью одиночно скатывающихся отцепов и другими особенностями в работе СГ, вводится показатель напряженности работы:
 усл. ед., (2.20)
усл. ед., (2.20)
где X од – число групп одиночно скатывающихся друг за другом
отцепов подряд по 2,3, 4,..., n в группе;
P од – частота таких групп.
 7 Особое место в методологии оценки надежности ОЗ занимает показатель L логической сложности принятия решений. Он зависит, как отмечено выше, от количества одновременно оцениваемых логических условий и рассчитывается выражением:
7 Особое место в методологии оценки надежности ОЗ занимает показатель L логической сложности принятия решений. Он зависит, как отмечено выше, от количества одновременно оцениваемых логических условий и рассчитывается выражением:
усл. ед., (2.21)
где Хm – число логических условий в группе по 1, 2, 3,.... m логических условий подряд, а Р m – частота таких групп.
|
|
|
Если в алгоритме принятия решения будут иметь место группы следующих друг за другом подряд логических условий по 4, 5, 6 и более, можно с уверенностью утверждать, что при дефиците времени ОЗ окажется ненадежным, так как показатель L будет превышать допустимое значение, равное 1,0.
2.5 Алгоритмы автоматической поддержки принятия
решений, реализуемые ПИ ПФ
Исследование алгоритмов деятельности ДСЦ, изучение реальных процессов формирования составов и высказанные мнения диспетчеров, выступающих в роли экспертов, позволили установить перечень задач, решение которых требует интеллектуальной поддержки.
Сложность принятия решений обусловлена наличием трудноучитываемых факторов в процессе накопления составов, многообразием возникающих ситуаций как со стороны СГ, так и в районе вытяжки на выходе из ПФ. В этих условиях ДСЦ необходимо удерживать в кратковременной памяти большие объемы информации, выполнять перебор различных многовариантных ситуаций для правильного принятия решений. Последнее усугубляется дефицитом времени на оценку ситуаций.
К числу таких принимаемых решений следует в первую очередь
отнести следующие:
- прогнозирование завершения накопления составов и подвязка готовых составов к «нитке» графика;
- выбор очередности роспуска составов из числа готовых к надвигу на горку;
- выбор оптимальных маршрутов заезда маневровых локомотивов, связанных с перестановками вагонов и подформированием (осаживанием, подтягиванием) со стороны вытяжки;
- оценка нештатных оперативно-технологических ситуаций на путях ПФ, требующих первоочередного вмешательства (изъятие поврежденного вагона, неподход центров, прикрытие вагонов ВМ, недопустимо большое «окно» между вагонами и др.).
Одной из сложных задач принятия решений является выбор очередности роспуска составов. В условиях сгущенного подхода поездов и наличия в ПП нескольких готовых к роспуску составов принятие решения без автоматической поддержки немыслимо. Критерием выбора определенного состава к роспуску является максимальное обеспечение накапливаемых составов замыкающими группами вагонов для завершения процесса накопления в ПФ.
Здесь ДСЦ необходимо непрерывно решать комбинаторную задачу, связанную с оценкой по каждому пути ПФ степени готовности накопления вагонов по весу и длине, количества недостающих замыкающих групп вагонов для завершения накопления и выставки в ПО и наличия таких групп вагонов (отцепов) в составах, которые готовы к роспуску.
Сложность решения такой задачи можно проиллюстрировать на рисунке 2.13.

Рис. 2.13. Иллюстрация выбора очередности роспуска составов
Для всех составов, готовых к надвигу на горку, требуется произвести «разложение» отцепов по путям ПФ. После этого следует «просмотреть» все пути парка на предмет недостающих замыкающих групп для завершения накопления составов. Из числа готовых составов выбирается тот, в котором имеются отцепы, завершающие накопление составов сразу на нескольких путях.
Формально следует «проиграть» большое число вариантов. Например, в ПП 3 состава готовы к роспуску. В каждом составе среднее число отцепов равно 40. Количество путей ПФ – 42. Тогда число вариантов составляет 504. В соответствии с такой процедурой был разработан и исследован алгоритм действий ДСЦ (ДСПГ).
Располагая структурно-логической схемой, представилось возможным количественно оценить показатель L логической сложности принятия решений ДСЦ без автоматической поддержки. Он зависит от количества одновременно оцениваемых человеком логических условий и рассчитывается по ранее приведенной формуле 2.21.
Для данного алгоритма такой показатель L = 6усл. ед.,что в 6 раз превышает возможности ДСЦ на этапе принятия решения. Если учесть дефицит времени, то становится совершенно очевидной необходимость интеллектуальной поддержки принятия таких решений, передав функции автомату.
В основу алгоритма функционирования автомата положено взаимодействие (рис. 2.14) в реальном режиме времени ПИ ПП, АСУ СС, ПИ ПФ. Данные о готовности составов передаются из ПИ ПП в АСУ СС и сервер БД. В АСУ СС составляются программы роспуска готовых составов и передаются в сервер БД.
В сервер БД АСУ СС от ПИ ПФ передаются сведения о фактическом накоплении составов по каждому пути по весу и длине. Исходя из плана формирования по каждому направлению, АСУ СС, располагая данными от ПИ ПФ, рассчитывает на каждый момент времени недостающие длины и веса по каждому пути ПФ и передает в сервер БД. При этом идентифицируются номера путей, где для завершения накопления необходимы замыкающие группы. Имеющейся таким образом информации в БД уже достаточно для автоматического решения задачи выбора очередности роспуска.
Как представлено на рис. 2.13, на текущий момент в ПП имеется состав на 1-м пути, готовый к роспуску. Согласно программе в этом составе 41 отцеп. ОТ ПИ ПФ или СТЦ в БД АСУ СС поступает информация о номерах путей 11-й, 13-й и 32-й, где недостает вагонов по весу и длине для полного завершения накопления.
Рис. 2.14. Алгоритм автоматического выбора очередности роспуска
После идентификации маршрутов скатывания автомат установил, что отцепы 2, 4, 40 и 41 обеспечат завершение накопления вагонов на 11-м, 13-м и 32-м путях ПФ.
Реализация программы включает в себя вызов массива данных из БД «Готовые к роспуску составы ПП» (блок 2) и формализованное разложение отцепов i -го состава (блок 4), идентификацию в нем отцепов, которые обеспечат «покрытие» недостающих длин DL и весов DP на путях, где уже заканчивается накопление (блоки 4 ¸ 7). При наличии таких отцепов автомат принимает решение о роспуске данного i -го состава (блок 8), и программа завершается.
Если i -й состав не удовлетворяет необходимым условиям (блоки 3, 6 и 7), то в алгоритме выполняется переход к блоку 10. Здесь для (i +1)-го состава процедура выбора очередности роспуска полностью повторяется. При отказе автомата и от этого состава происходит «просмотр» (i +2)-го, (i +3)-го готовыхсоставов и так до тех пор, пока не будет найден состав, в котором имеются отцепы с замыкающими группами вагонов, «покрывающими» недостающие длины и веса составов, завершающих накопление по путям ПФ.
При отсутствии приемлемого состава в алгоритме предусмотрен выход из программырекомендацией ДСЦ принять решение по своему усмотрению.
Предложенный алгоритм и методология автоматической поддержки принятия решений вполне приемлемы для создания программных продуктов при практической реализации задач выбора оптимальных маршрутов заезда маневровых локомотивов, поиска и планирования операций осаживания и перестановки вагонов, очередности выставки сформированных
составов в ПО и др.
Второй задачей, возлагаемой на ПИ ПФ, является выбор маршрутов заезда маневровых локомотивов на выходе ПФ (в зоне вытяжки составов).
Алгоритм автоматического выбора вариантов маневровых заездов на выходе путей ПФ (рис. 2.15) базируется на непрерывном ведении в динамической БД ранее описанных пространственно-временных моделей
мониторинга ситуации необходимости выполнения маневровых работ.
В БЗ сформулирован набор правил продукций (вывода) на основе экспертных оценок алгоритмов и экспериментальных исследований.
Рис. 2.15. Блок-схема алгоритма выбора вариантов маневровых
передвижений на выходе ПФ
Практически все ситуации, требующие заездов локомотива (локомотивов), формируются в динамической БД ПИ ПФ. Сообщения о необходимости перестановки вагонов с пути на путь могут поступать от операторов СТЦ при выявлении больных (после роспуска) вагонов, не выявленных «чужаков» – от составителей в период формирования составов и др.
Сведения об окнах недопустимой величины поступают автоматически от подсистемы КЗП.
Информация о необходимости выставления накопленных составов формируется в СТЦ (АСУ СС) при подготовке телеграммы-натурки на готовый состав.
Изложенное выше дает основание считать возможным автоматическое решение задачи поиска наиболее оптимального варианта заездов маневровых локомотивов на выходе путей ПФ.
Следует отметить, что при кажущейся тривиальности алгоритма выбора пути заезда локомотива (рис. 2.15), решение такой задачи человеком (ДСЦ, ДСПФ) весьма сомнительно. Здесь имеется в виду необходимость выявления ситуаций сразу по всем путям ПФ, число которых может колебаться от 24 до 64.
Блок «Отображение технологических окон» в алгоритме предусматривает формирование для ДСПФ и ДСЦ отображения результатов маневровых заездов с их одновременным протоколированием.
Процедуру выбора правил вывода из БЗ (блок алгоритма «Выбор правила вывода из БЗ») можно проиллюстрировать на рис. 2.16.
Рис. 2.16. Организация механизма вывода в продукционной БЗ
подсистемы информатизации ПФ
После установления перечня видов требуемых маневровых работ
в представленном алгоритме высшим приоритетом (критерием) выбора маршрута заезда локомотива пользуется вариант, где одновременно можно выполнить сразу одним заездом несколько видов работ:
- изъять с пути или доставить на путь вагон или группу вагонов;
- произвести осаживание вагонов;
- выполнить подтягивание соединенных вагонов в сторону вытяжки и др.
2.6 Алгоритмы автоматической поддержки принятия
решений в процессе роспуска составов
Причинами, обусловливающими необходимость интеллектуальной «помощи» ДСПГ, являются непрерывно возникающие ситуации в подгорочном парке, требующие принятия решения при выполнении маневровых работ, точнее – поиске маршрутов перемещения из пучка в пучок, с пути на путь.
К числу таких ситуаций относятся:
- вынужденные перестановки вагонов из пучка в пучок;
- отсутствие проходов в подгорочном парке;
- необходимость осаживания со стороны горки;
- изъятие «чужаков» и «больных» вагонов;
- прикрытие вагонов с опасным грузом;
- команды, поступающие от ДСЦ, и др.
Ниже в данном разделе с использованием логико-алгоритмического подхода дано построение «идеального» алгоритма принятия решений ДСПГ, который мог бы быть реализован при наличии достаточного времени. Это касается маневровых передвижений в подгорочном парке.
Для построения алгоритма принятия различных решений введены следующие элементарные операции (действия):
- Кiл, Kjл, Kgл – контроль местонахождения локомотива соответственно в i -м, j -м, g -м и др. пучках;
- Кiг, Kjг, Kgг – контроль готовности накопления составов соответственно в i -м, j -м, g -м и др. пучках;
- Кiоп, Kjоп, Kgоп – контроль отсутствия проходов соответственно в i -м, j -м, g -м и др. пучках;
- Кзр – контроль завершения роспуска;
- Kiос, Kjoc, Kgос – контроль ситуаций необходимости осаживания вагонов в i -м, j -м, g -м пучке;
- Kiч, Kjч, Kgч – контроль местонахождения «чужаков» в i -м, j -м, g -м пучке;
- Yiоп, Yjоп, Ygоп – принятие решения о заезде локомотива для устранения отсутствия проходов соответственно в i -м, j -м, g -м пучке;
- Yiос, Yjос, Ygос – принятие решения о направлении локомотива для осаживания вагонов в i -й, j -й, g -й пучок;
- Yiч, Yjч, Ygч – принятие решения на изъятие локомотивом «чужака» или «больного» вагона из пучка соответственно i -ro, j -ro и g -го;
- Kiо, Kjо, Kgо – команда машинисту о заезде на путь в пучке i -м, j -м, g -м соответственно для отстоя в период роспуска.
К оцениваемым логическим условиям с исходами 1– да и 0 – нет относятся:
- aiг, ajг, agг – состав готов по накоплению в i -м, j -м, g -м пучке;
- aiоп, ajоп, agоп – имеет место отсутствие прохода в i -м, j -м, g -м пучках;
- aзр – роспуск завершён;
- aiос, ajос, agос – осаживание необходимо в пучках i, j, g;
- aiч, ajч, agч – на пути в i -м, j -м, g -м пучках имеется «чужак» («чужаки»);
- aiсп, ajсп, agсп – пучок i -й, j -й, g -й свободен от скатывания отцепов;
- a1пс, ,a2пс, a3пс – маневровый заезд через 1-ю, 2-ю, 3-ю пучковую стрелку возможен;
- aiп, ajп, agп - локомотив в i -м, j -м, g -м пучке имеется.
Алгоритм выбора вариантов заезда должен предусматривать удовлетворение следующих критериев:
- максимальное совмещение нескольких технологических операций за один заезд К1;
- возможность в процессе скатывания отцепов маневрового заезда К2;
- длина углового заезда локомотива – К3 (количество занимаемых
стрелок и участков).
Под критерием K1 понимается наличие в пучке локомотива и сразу 3-х ситуаций, требующих немедленного устранения: отсутствие проходов; необходимость осаживания вагонов и изъятие «чужаков».
Критерий К2 предполагает разную значимость выполняемых работ. Наибольший вес имеет ситуация отсутствия прохода на пучковой стрелке, когда роспуск в пучок недоступен. Здесь при наличии локомотива в подгорочном парке необходима приостановка роспуска и устранение опасной ситуации.
Критерий К 3 является противоречивым. Здесь выбор самого кратчайшего пути заезда не всегда оправдан при выполнении только одной технологической ситуации. Например, заезд локомотива на соседний путь для устранения окон. Более целесообразно выполнить заезд в средний или крайний пучок для выполнения сразу нескольких операций: восстановление проходов, осаживание и изъятие «чужака» или «больного» вагона. Оптимизация работ по этому критерию требует привлечения математического аппарата для выбора маршрутов перемещения маневрового локомотива. Поскольку возникающие ситуации на путях ПФ в процессе накопления могут иметь нечёткий, расплывчатый характер, адекватным математическим аппаратом может быть подход к оценке принятия решений на основе ТНМ.
На основе результатов экспертной оценки и натурных исследований маневровых работ в подгорочном парке на рис. 2.17 приведён фрагмент алгоритма действий ДСПГ при выборе вариантов принятия решений по устранению неблагоприятных ситуаций. При этом следует отметить два варианта алгоритмов принятия решений по использованию локомотивов:
- в процессе роспуска в подгорочном парке (пучке) имеется локомотив, который может параллельно с роспуском выполнять работу
по восстановлению проходов, осаживанию, перестановке «чужаков» и др.;
- выполнение маневровых работ в подгорочном парке локомотивом, надвигающим состав на горку после завершения процесса надвига.
Рис. 2.17. Алгоритм действий ОЗ при выборе вариантов
маневровых заездов в период роспуска
Второй режим использования локомотива предполагает оперативное планирование ДСПГ работ в подгорочном парке, так как в процессе скатывания отцепов могут возникать и «чужаки», и отсутствие проходов, и «больные» вагоны, и др.
Алгоритм выбора вариантов маневровых работ локомотивом, находящимся в пучке во время роспуска, начинается с оценки местонахождения локомотива Кл ® aп и наличия работы по восстановлению проходов Коп ® aоп. Возможность выполнения такого вида работы оценивается
отсутствием в этот пучок или часть пучка отцепов из оставшейся части надвигаемого состава aсп. Если имеется такая возможность aсп  , то даётся команда машинисту на восстановление проходов Y оп, a затем осаживание вагонов Yoc. Изложенный алгоритм полностью идентичен для выполнения работ в последующих пучках, в которых в период роспуска
, то даётся команда машинисту на восстановление проходов Y оп, a затем осаживание вагонов Yoc. Изложенный алгоритм полностью идентичен для выполнения работ в последующих пучках, в которых в период роспуска
находится маневровый локомотив.
При отсутствии локомотива ни в одном из пучков (a 1n = 0, a jn = 0, a jn = 0) происходит реализация алгоритма выполнения работ после окончания роспуска, который здесь не приведен. После завершения роспуска Кзр → aзр ДСПГ даёт команду на устранение ситуаций отсутствия проходов Коп → aоп  Yоп, если они имели место до роспуска или возникли при скатывании отцепов очередного расформировываемого состава. Этот вид работ является самым приоритетным, поэтому в алгоритме логическими условиями a iоп , a jоп , a gоп проверяется каждый пучок. Если ни в одном
Yоп, если они имели место до роспуска или возникли при скатывании отцепов очередного расформировываемого состава. Этот вид работ является самым приоритетным, поэтому в алгоритме логическими условиями a iоп , a jоп , a gоп проверяется каждый пучок. Если ни в одном
из пучков нет ситуации отсутствия проходов, то следующий шаг алгоритма переходит к оценке в каждом пучке наличия работы по изъятию «чужаков» ai ч, aj ч, ag ч и даётся команда на их устранение Yч в том или ином пучке.
Завершающим циклом алгоритма является выбор путей ПФ, где необходимо осаживание вагонов и принятие решений по выполнению этой работы.
В маловероятном случае, когда в алгоритме не обнаружен ни один из видов работ, происходит проверка наличия пути, где состав уже накоплен по весу и длине и куда не будут скатываться отцепы при последующем роспуске. При наличии такого пути принимается решение о направлении туда локомотива для отстоя К о с последующим возвращением к предыдущему алгоритму.
Расчёт сложности реализации алгоритма, представленного на рис. 2.17, при оценке ситуаций в пучках для одного пути позволил установить значение L = 2,8 усл. ед., что превышает втрое возможности ДСПГ при принятии решений.
Хранение в памяти многообразных изменяющихся ситуаций в подгорочном парке имеет свои предельные возможности по ранее установленному показателю загрузки памяти Кп. Было показано, что при необходимости удерживать в памяти ситуации на 5 путях показатель Кп превышал предельные возможности человека вдвое.
Становится очевидным необходимость автоматизации процесса хранения и отображения возникающих при роспуске составов оперативно-технологических ситуаций в подгорочном парке.
Блок-схема алгоритма автоматического выбора пути заезда локомотива в подгорочном парке приведена на рис. 2.18.
Рис. 2.18. Блок-схема алгоритма автоматического выбора пути
заезда локомотива в подгорочном парке
Здесь при идентификации номера пути, где находится маневровый локомотив, автоматически выявляется возможность выполнения манёвров в пучке в процессе роспуска состава. Исход «да» логического условия «манёвры возможны» является сигналом обращения к серверу БД и выбора из множества ситуаций в пучке номеров путей, где требуется выполнение маневровых работ.
Следует отметить, что множество информационных признаков в БД (видов работ), которые требуют маневровой работы, непрерывно уменьшается при устранении окон, «чужаков» и др. или увеличивается в процессе текущего роспуска состава.
В основу поиска оптимального маршрута заезда положены ранее оговоренные следующие категории: максимальное совмещение нескольких видов работ; важность маневровой работы и минимальная длина перемещения локомотива «с пути на путь».
На первом шаге выбора пути заезда выполняется поиск в пучке (где находится локомотив) самой приоритетной ситуации, когда одновременно имеется «чужак» или «больной» вагон, требуется осаживание вагонов и восстановление прохода. При исходах «да» логических условий «на пути чужак», «требуется осаживание» и «отсутствует проход» в сервере БЗ происходит перебор хранящихся заранее сформулированных правил вывода и выбор пути, где требуется выполнение маневровых работ.
В качестве примера таких правил БЗ можно привести следующие:
- «если на пути одновременно имеется «чужак» & требуется осаживание & необходимо восстановление прохода, то в первую очередь необходимо направить локомотив на этот путь для выполнения работ»;
- «если на пути нет «чужака» & требуется осаживание & отсутствует
проход, то необходимо направить локомотив на этот путь для выполнения
работ»;
- «если на пути нет «чужака» & не требуется осаживание вагонов & отсутствует проход, то на этот путь необходимо направить локомотив для восстановления проходов отцепов».
Если такой путь найден для разных уровней приоритета выбора маршрута заезда, то автоматически выполняется установка стрелок по маршруту заезда локомотива «с пути на путь».
При наличии маневровых светофоров машинист руководствуется их показаниями. Гарантией безопасности перемещения локомотива является свободность пучка, или его половины, или его четверти от скатывания отцепов из состава, который находится в режиме роспуска.
Если во время роспуска состава ни в одном из пучков не имеется локомотива, то поиск оптимального маршрута заезда будет иметь место для горочного локомотива, освободившегося после отрыва последнего отцепа на горбе горки.
Наличие интеллектуального интерфейса ПИ и АРМа ДСПГ предполагает необходимость отображения на мониторе состояния путей и маршрутов заезда локомотива «из пучка в пучок», «с пути на путь». На первоначальном этапе функционирования подсистемы интеллектуальной поддержки принятия решений предполагается выдача «советов» эксплуатационному персоналу о выбранном маршруте заезда с установкой маршрута вручную при согласии ДСПГ с автоматом. По мере дальнейшей эксплуатации подсистемы и полном к ней доверии установка маршрутов может быть полностью передана автомату.
В числе «советов», предлагаемых автоматом ДСПГ, может быть рекомендация о пути отстоя локомотива на период роспуска состава. В алгоритме выработки такого «совета» должны быть заложены условия гарантированной безопасности отстоя локомотива. Информационной поддержкой для выбора такого места является идентификация путей, куда
в надвигаемом составе отсутствуют отцепы по программе или на которых уже произошло накопление вагонов по весу и длине.
Особое место в решаемой проблеме занимает автоматизация принятия решений при поиске (в условиях дефицита времени) путей для отсева отцепов, отклонившихся от заданной программы («чужаков»).
Решение такой задачи предполагает отработку двух алгоритмов:
- ведение ситуационной модели состояния путей подгорочного парка до роспуска состава;
- автоматический поиск пути отсева соединившихся при нагоне
отцепов и (или) отцепов, отклонившихся от своего маршрута по причине
неперевода стрелки, перетормаживания, неправильного расцепа и др.
Блок-схема первого алгоритма представлена на рис. 2.19. Здесь после выбора готового к роспуску состава при получении из АСУ СС программы и после её редактирования ДСПГ директивно с АРМа производится «разложение» отцепов по путям (маршрутам скатывания). Формализованное «разложение» отцепов преследует цель прогноза неизбежных отсутствий проходов (при длинных отцепах и завершении накопления составов) и выявления путей, куда будут скатываться отцепы данного состава. При исходе «да» логических условий «отсутствие проходов неизбежно» и «имеются пути, свободные от роспуска» номера путей с такими признаками автоматически заносятся в сервер БД для формирования модели признаков по путям.
Принимая во внимание наличие системы автоматизации СГ, выбор путей, где уже находятся «чужаки» (автоматически выявленные в процессе предыдущих роспусков подсистемой ГАЦ) и где требуется осаживание вагонов (автоматически выявленное подсистемой КЗП), не представляет никакой алгоритмической сложности.
Готовность составов по накоплению длины и веса как признак поступает из АСУ СС и на блок-схеме входит в логическое условие «имеются пути, свободные от роспуска».
Признак запрета роспуска «на пути находится локомотив» в современных комплексах автоматизации СГ (например, КГМ ПК) идентифицируется автоматически с помощью ДСО в зоне III-й ТП.
Из этого следует, что все информационные признаки формируются автоматически и являются основой для ведения в БД модели состояния всех путей ПФ до скатывания отцепов выбранного к роспуску состава.
Обновление модели происходит автоматически после роспуска каждого очередного состава.

Рис. 2.19. Блок-схема алгоритма формирования ситуационной
модели состояния путей подгорочного парка
При выполнении маневровых работ по осаживанию, вытягиванию готовых составов в ПО, изъятию чужаков для повторного роспуска, восстановлению проходов и др. часть из информационных признаков в модели «гасится» ДСПГ с помощью клавиатуры АРМа. Наличие модели состояния путей подгорочного парка и отображение на мониторе АРМа ДСПГ являются информационной базой для реализации алгоритма автоматического принятия решений при поиске оптимальных путей отсева чужаков и запусков, изображенного на рис. 2.20.
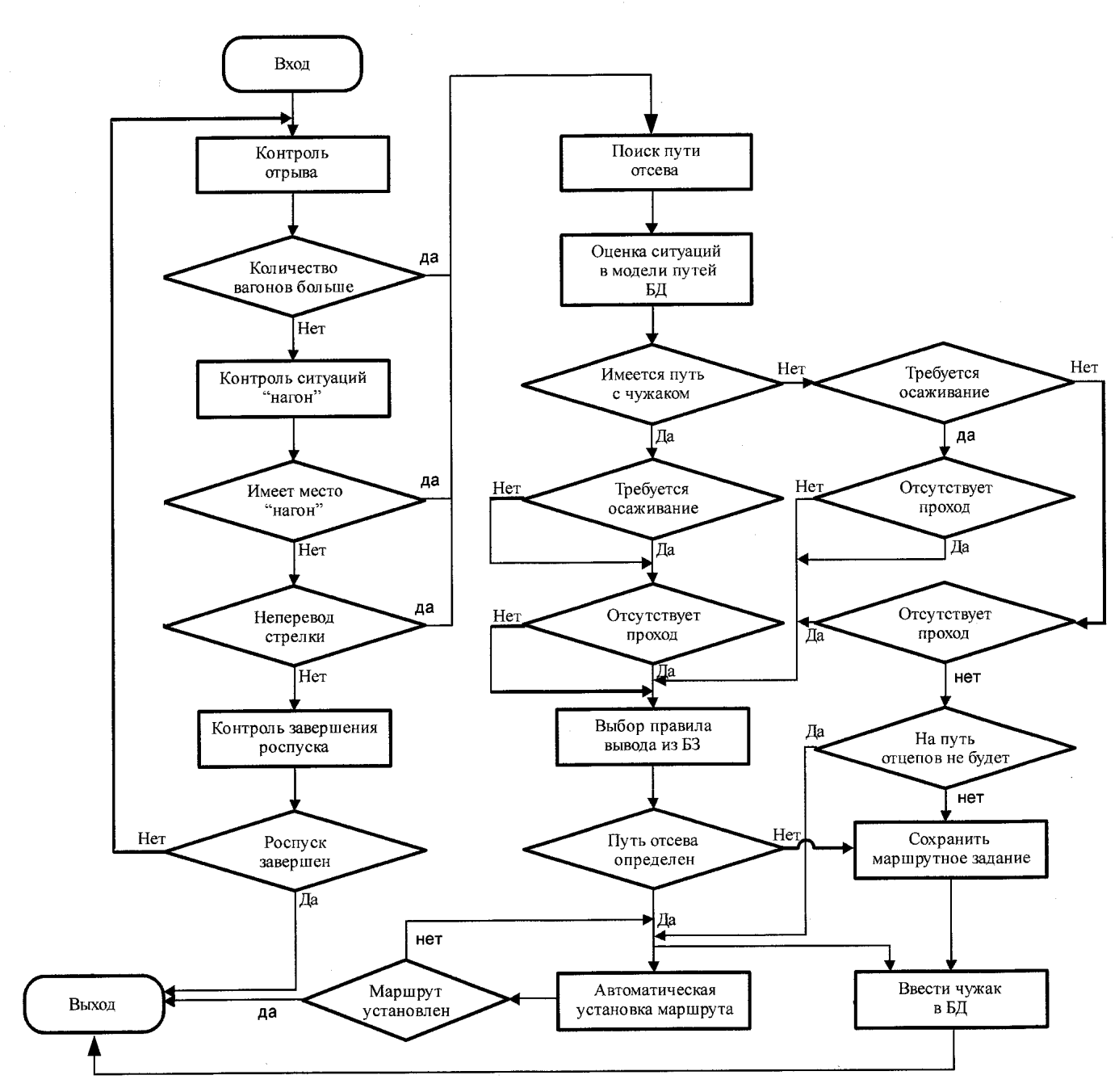
Рис. 2.20. Блок-схема алгоритма автоматического принятия решений при сбоях процесса роспуска
Контроль отрыва отцепов и выявление неправильных расцепов
в оторвавшихся отцепах – это задачи, которые решаются в известных системах автоматизации горок [3, 16]. В контексте решаемой задачи при неправильном расцепе, когда число вагонов в отцепе больше заданного по программе, установление факта следования не по своему маршруту лишних вагонов является сбоем и требует принятия решения о выборе пути отсева (исход «да» логического условия «Количество вагонов больше»).
Важное место в алгоритме занимают блок «Контроль ситуаций нагона» и логическое условие «Имеет место нагон». Идентификация нагонов обеспечивается ранее описанной пространственно-временной моделью. При исходе «да» логического условия также включается задача поиска
пути отсева.
Выявление запусков по причине неперевода стрелок из-за сокращения интервалов между смежными отцепами также обеспечивает пространственно-временная модель. При исходе «да» логического условия «Неперевод стрелки» для последующего отцепа вновь включается задача поиска пути отсева.
Таким образом, информационными признаками запуска задачи поиска пути отсева являются: неправильный расцеп; нагон; запуск.
Поиск пути отсева при возникновении ситуаций сбоя и отклонений от заданной программы начинается с оценки в БД состояния путей. Здесь в пучке, куда должен скатиться впередиидущий отцеп, выполняется поиск такого пути, где уже имеется (имеются) «чужак» («чужаки»), одновременно требуется на этом пути осаживание вагонов и необходимо восстановление прохода. Для различных ситуаций, возникающих на путях, в сервере БЗ хранится набор правил вывода, определяющих принятие решение. В данной ситуации автомат однозначно выберет путь отсева, где имеет место наличие «чужака», большие «окна» и отсутствие прохода.
Наличие одновременно трёх признаков на одном пути – это редкое событие, поэтому в алгоритме предусмотрены различные сочетания информационных признаков. Если на пути нет «чужака», то идёт проверка наличия ситуаций «требуется осаживание», «отсутствие проходов» и отсутствие скатывающихся отцепов из оставшейся части состава на горбе.
При исходах «да» логических условий «Требуется осаживание» и «Отсутствие прохода» автомат принимает решение о направлении «чужака» на такой путь.
Третья итерация поиска при отсутствии пути с «чужаком» и необходимостью осаживания состоит в нахождении ситуации «Отсутствует проход». При наличии такой ситуации принимается решение о направлении «чужака» в хвост вагона, перекрывающего габарит прохода на соседний путь.
Последняя, четвёртая итерация поиска завершается выбором пути, свободного от отцепов расформировываемого состава. При исходе «да» туда направляются «чужак» или запуск.
При отсутствии на путях ситуаций, требующих маневровых заездов, автомат принимает решение сохранить маршрутное задание впередиидущему отцепу с «чужаком».
Направление «чужаков» и запусков на выбранные автоматом пути фиксируется в сервере БД, что позволяет вести новую модель состояния путей в пучках для использования при роспуске последующего состава.
Глава 3 Технические решения и технология создания
подсистем информатизации
Практическая реализация ПИ на СС должна предусматривать два варианта технических решений:
- на основе уже функционирующих АДК-СЦБ;
- на базе самостоятельных одноплатных ПК, увязанных с релейно-контактной аппаратурой ЭЦ парков СС и УВК системы автоматизации СГ.
Первый вариант решается без параллельной компоновки технических средств ПИ и предусматривает лишь расширение функций АДК-СЦБ [13] (в частности, ИВК-АДК) на алгоритмическом уровне. Здесь, кроме решаемых «собственных» задач диагностирования и мониторинга состояния устройств, ИВК-АДК «поручается» решение задач информатизации парков и СГ, а также автоматическое принятие решений в оперативно-технологических ситуациях, изложенных в предыдущих разделах учебного пособия. В случае недостаточности информационно-вычислительных ресурсов АДК СЦБ парков и СГ существующие ИВК-АДК дополняются
(агрегатируются) еще одним ПК, решающим только задачи ПИ на основе БД и БЗ. Такое агрегатирование (рис. 3.1) не требует капитальных затрат, используя порты COM/Eth, COM1, COM2 и т.д.
Второй независимый вариант требует выбора и компоновки наиболее приемлемых ПК, технических средств сбора, преобразования, отображения ситуаций и графиков на мониторах АРМов, а также протоколирования результатов работы парков и СГ.
Исходя из такой концепции, ниже рассмотрены оба возможные варианты построения ПИ.








