 2018-01-08
2018-01-08 2673
2673При выполнении лабораторной работы студенты:
1) изучают назначение, конструкции и работу ручной, зубчатофрикционной и электрореверсивной лебедок;
2) производят контрольные замеры и проверочные расчеты основных кинематических параметров лебедок и их анализ;
3) оформляют отчет о лабораторной работе.
Лабораторное оборудование, инструмент и приборы
а) Лебедки: ручная строительная, зубчатофрикционная иэлектрореверсивная.
б) Канат стальной диаметром 6...10 мм (на ручной лебедке).
в) Инструмент и приборы:
· динамометр с максимальным усилием 3 тс;
· динамометр с максимальным усилием 20...40 кгс;
· штангенциркуля - 2 шт.;
· линейки металлические 50 см - 2 шт.
г) Плакаты с изображением лебедок.
д) Кинематические схемы лебедок по ГОСТ 2.770-68.
Основные правила техники безопасности
При выполнении лабораторной работы запрещается:
· производить замеры и включать лебедки без указания преподавателя или учебного мастера;
· заходить за ограждение при работающей лебедке;
· производить замеры параметров лебедок с электроприводом при включенном пакетнике и главном рубильнике.
При подсчете числа зубьев колес ручной лебедки обязательно пользоваться палочкой, карандашом и т.п., чтобы не получитьтравму пальцев при неосторожном повороте рукоятки.
Общие сведение о лебедках и описание лабораторного оборудования
Строительные лебедки предназначены для подъема или перемещения груза. По типу привода она подразделяются на механические и ручные; по числу барабанов - одно- и многобарабанные; по направлению вращения барабана - реверсивные и нереверсивные; по скорости намотки каната - одно- и многоскоростные.
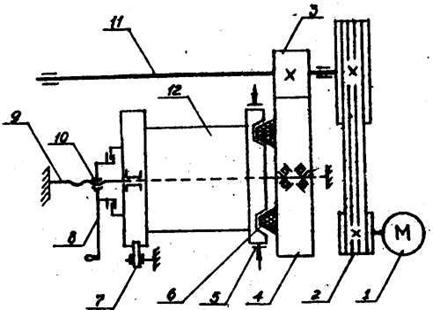
Ручная строительная лебедка (рис.1) применяется для подъема (опускания) груза и перемещения его по горизонтальной или наклонной плоскостям на строительной площадке при монтажных и погрузочно-разгрузочных работах. Конструктивной обязанностью лебедки является наличие двухскоростной передачи и винтового грузоупорного тормоза с храповым остановом, чем обеспечивается её безопасная работа. Привод барабана лебедки осуществляется одной или двумя рукоятками через двухступенчатую, двухскоростную открытую зубчатуюпередачу.
Для работ на первой (меньшей) скорости необходимо зубчатое колесо 9 соединить жестко с валом 8. Для этого нужно зубчатое колесо 10 вывести из зацепления с шестерней и передвинуть его по направляющей шпонке 10,а вдоль вала влево до входа торцевых кулачков колеса между спицами колеса 9. Крутящий момент от рукояток будет передаваться на барабан лебедки 14 через вал I, шестерню блока 4 с числом зубьев Z1, колесо 9, торцевые кулачки колеса 10, направляющую шпонку, промежуточный вал 8, шестерню и колесо II.
Для работы на второй (большей скорости) необходимо зубчатое колесо 10 передвинуть вдоль вала вправо и ввести в зацепление с большей шестерней блока 4 с числом зубьев Z11.
При подъеме груза храповое колесо 3, свободно насаженное на вал I, вращается за счет того, что оно зажато между фланцем 2 и блоком шестерен 4, а собачка проскальзывает по зубьям. После прекращения подъема, под действием силы тяжести груза, барабан 14 поворачивается в обратном направлении, вращая через зубчатые передачи II и 10 блок шестерен 4. Поэтому блох шестерен 4 силами трения по-прежнему связан с храповым колесом,которое остается зажатым между блоком шестерен 4 и фланцем 2. Благодаря этому создается необходимый момент трения, который обеспечивает работу грузоупорного тормоза (храпового останова): храповое колесо, упираясь зубом в собачку, препятствует даль-нейшему повороту блока шестерен 4.

Рис.1. Кинематическая схема ручкой лебедки
1-ведущий вал (с резьбой на участке блока шестерен 4); 2-упоряый фланец; 3-храповый останов (собачка и храповое колесо); 4-блок шестерен с внутренней резьбой и фланцем; 5-упорные гайки; 6-рукоятки; 7-подшипники; 8-промежуточный вал; 9 и 10-зубчатые колеса; 11-шестерня и колесо второй ступени передачи; 12-ось барабана; 13-подшипники барабана; 14-барабан
Чтобы опустить груз, необходимо вращать рукоятку в направлении, обратном подъему. При этом храповое колесо перестает быть прижатым к фланцу, так как блок шестерен 4 свинчивается по резьбе влево. Поэтому при опускании груза храповое колесо не вращается и не мешает вращению вала 1.
Зубчато-фрикционная лебедка (рис.2) предназначена для комплектования копровых и скреперных установок, машин для разработки мерзлых грунтов ударным способом и монтажных работ. Лебедки такого типа используют и в качестве механизмов экскаваторов. Конструктивной особенностью привода является использование фрикциона.
Ряс.2. Кинематическая схема зубчато-фрикционной лебедки
1-электродвигаталь; 2-клиноременная передача; 3-4-шестерня и колесо зубчатой передачи; 5-ленточный тормоз; 6-фрикцион; 7-собачка храпового останова; 8-рычаг управления; 9-ось барабана с резьбой на концевом участке; 10-втулка с гайкой; 11-вал; 12-барабан
Включение и выключение электродвигателя l осуществляется нажатием соответствующих пусковых кнопок на щите управления, а барабана - поворотом рычага 8. При включении барабана и работе лебедки ленточный тормоз 5, постоянно замкнутого типа, растормаживается нажатием и удержанием педали ногой.
Включение барабана на подъем осуществляется поворотом рычага управления 8 против часовой стрелки. При этом втулка с гайкой 10, двигаясь по резьбе на оси барабана 9, перемещает барабан 12 в осевом направлении в сторону зубчатого колеса 4 и прижимает с усилием конические поверхности фрикциона, создавая необходимый момент трения, обеспечивающий их оцепление. Барабан начинает вращаться, поднимая груз. Для длительного удержания груза на весу собачка с помощью связанного с ней рычага вводится в зацепление с храповым колесом.
Опускание груза происходит под действием его силы тяжести при выключенном фрикционе и расторможенном ленточном тормозе. Электродвигатель при этом может быть выключен или работать вхолостую.
Так как под действием силы тяжести происходит свободное падение груза, то создаются наилучшие условия, например, при забивке свай, так как кинетическая анергия пропорциональна квадрату скорости падающей части.
Электрореверсивная лебедка (рис.3) принадлежит к группе строительно-монтажных лебедок (ГОСТ 2914-67). Конструктивная схема таких лебедок одинаковая и выполнена по П-образной компоновке (электродвигатель-редуктор-барабан). Особенностью конструкции являемся реверсивность работы и наличие короткоходового электромагнитного нормально замкнутого колодочного тормоза 3.
Торможение происходит в момент отключения электродвигателя. В результате спуск груза, как и подъем, происходит в силовом режиме (при работающем электродвигателе). Этим обеспечивается постоянная скорость опускания груза, что облегчает управление лебедкой и повышает безопасность в работе.
Включение электродвигателя на подъем и спуск груза осуществляется нажатием пусковой кнопки на щите управления.
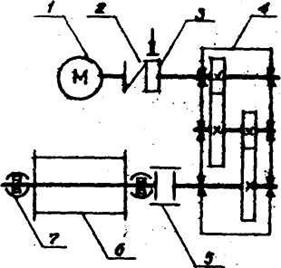
Рис.3. Кинематическая схема электрореверсивной лебедки:
1-Электродвигатель; 2-муфта типа м7вп; 3-електромагнитный колодочный тормоз; 4-двухступенчатый редуктор; 5-муфта типа м3; 6-барабан; 7-сферические роликоподшипники

