 2018-01-08
2018-01-08 607
607
Профилирование мотальных кулаков. К профилированию кулака можно приступить только после очень тщательной проверки расчета кинематической схемы. После профилирования кулака не рекомендуется менять основные параметры схемы, так как это может повести к существенному искажению закона перемещения нитеводителя.

Рисунок 2.26 – Кривая перемещения кольцевой планки при конической намотке
Профилирование кулачка можно вести как графически, так и аналитически.
Графическое профилирование кулачка включает построение зависимости перемещения нитеводителя от времени или угла поворота мотального кулака (рис. 2.26), определение закона перемещения мотального рычага, определение минимального радиуса-вектора кулака и построение центрового и рабочего профилей мотального кулака.
В качестве примера рассмотрим мотальный механизм кольцепрядильной машины для конической намотки.
Закон перемещения нитеводителя при конической намотке выражается уравнением

где φi = φП — центральный угол, соответствующий ветви подъема кулачка (0 < φ < φП).
При опускании кольцевой планки φi = φ0,
где φ0— центральный угол, соответствующий ветви опускания мотального кулака, причем 0 < φ < φо, а φо = 2П — φп.
Для определения закона перемещения мотального рычага графическим методом необходимо последовательно находить законы перемещенияпромежуточных звеньев механизма в зависимости от закона перемещения кольцевой планки.
Первым промежуточным звеном является рычаг подъема РОВ (рис.2.27).
Из графика следует, что закон перемещения кольцевой планки состоит из ветви подъема ОС и ветви опускания СВ (первая соответствует углу поворота кулака φп, а вторая φ0).
Для определения положения колонки (башмака) кольцевой планки во времени при ее подъеме разделим отрезок абсциссы ОА на несколько равных частей (от 6 до 12), в результате чего получим точки 0, 1, 2, 3, 4, 5 и 6.
Проведем через эти точки вертикали до пересечения с кривой ОС, а затем снесем полученные точки с кривой на ось ординат.
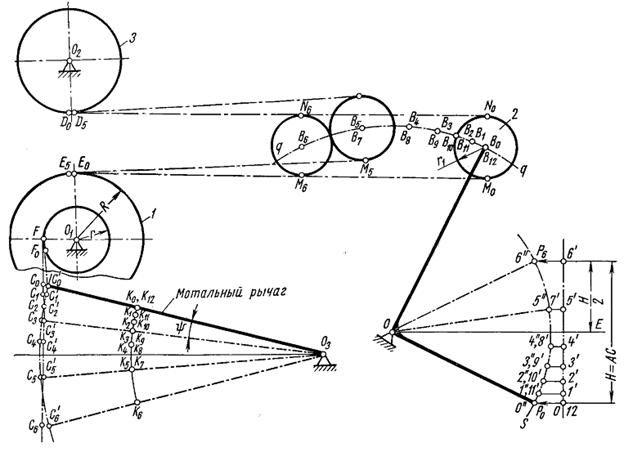
Рисунок 2.27 – Схема графического определения угла поворота мотального рычага. 1, 2, 3 – блоки.
В результате получим точки 0, 1', 2', 3', 4', 5' и 6'. Каждая из этих точек является координатой колонки в зависимости от времени или угла поворота мотального кулака.
Основная масса нити сосредоточена в средней части початка, поэтому кулак следует профилировать для положения механизма, когда плечо ОР рычага подъема колеблется симметрично горизонтали ОЕ. Следовательно, для определения положения центра ролика Р рычага подъема необходимо провести дугу SS радиусом ОР и снести на эту дугу точки с оси координат, причем отрезок 0 — 6' по оси ординат должен быть пер пендикулярным к горизонтали ОЕ и разделен этой горизонталью на две равные части (рис. 2.27). В результате построения получим искомые точки 0, 1", 2", 3", 4", 5" и 6" на дуге SS.
Для определения положения точки В, принадлежащей другому плечу рычага подъема, воспользуемся неизменным размером ВР.
Делая засечки на дуге qq (по которой перемещается точка В) радиусом ВР, получим закон перемещения точки В в зависимости от закона перемещения нитеводителя.
Определим длину цепи, смотанной с двухступенчатого блока.
Из полученных точек В0, В1, В2, В3, В4, В5, В6 проводим окружности радиусом блока плюс половина толщины цепи ri. Затем проводим касательные к окружностям 1, 2 и 3, т. е. как бы заправляем на эти блоки цепь. В результате получим точки касания E0M0N0D0 для нулевого положения точки В0 и точки E5M5N5 и D5 для текущего положения точки В5. Измеряем длину цепи на участке E0M0N0D0 = l 0 и на участке E5M5N5D5 = 15.
Длина цепи, смотанная с двухступенчатого блока.
Дуга В0В6 отличается от своей хорды не более чем на 2—3%, а блок 1 находится на значительном удалении от блоков 2 и 3, поэтому можно принять
Е5Е0 = D0D5.
В этом случае
Максимальная длина смотанной цепи с блока

Следовательно, точка крепления цепи к мотальному рычагу С будет описывать дугу С0С6 с хордой, равно S6, в том случае, если ось качания О3 мотального рычага лежит на перпендикуляре к хорде С'0С'6, проведенном через ее середину. При этом ось О3 надо расположить таким образом, чтобы свободно висящая цепь была параллельна хорде С'0С'6 и проходила через середину стрелы сегмента.
В первоначальном положении мотального рычага точка схода цепи с блока 1 обозначена F0 а длина цепи на участке блок l — мотальный рычаг равна C0F0. По формуле
определяем Si и откладываем найденные значения от точки F0 по первоначальному направлению цепи C0F0, В результате построения получим точки С0, С1, С2, С3, С4, C5 и С6.
Цепь прикреплена к рычагу в точке С0, перемещающейся по дуге рр, поэтому необходимо полученные точки перенести на эту дугу. В результате получим точки С'0, С'1, С'2, С'3, С'4, C'5 и С'6. Соединив эти точки с осью вращения мотального рычага О3, найдем положение центра К ролика: K0, K1, K2, K3, K4, K5 и K6.
Методика определения положения центра К при опускании кольцевой планки аналогична изложенной.
Если отрезок ВА по оси абсцисс разделить на столько же равных частей, на сколько был разделен отрезок OAi, то искомые точки К7, К8, К5, K10, К11 и К12 совпадут с найденными точками, соответственно K5, К4, К3, К2, К1 и К0.
При выборе минимального радиуса центрового профиля мотального кулака в первом приближении можно пользоваться эмпирической формулой
где d — диаметр вала, на котором будет крепиться мотальный кулак;
dp — диаметр ролика.
При точном определении минимального радиуса необходимо учитывать не только угол давления, но и закон перемещения нитеводителя и параметры кинематической схемы мотального механизма.
На многих мотальных механизмах кольцевых машин d = 30 мм, dp = = 30 мм. Следовательно, г = 40 … 45 мм, а минимальный радиус рабочего профиля кулака r = 25 … 30 мм.
Для облегчения условий работы кулака угол давления следует брать в пределах 20—25° и правильно выбирать направление вращения кулака. [7, стр.479-483]








