 2020-01-14
2020-01-14 242
242Исходные данные объекта управления (электропривода) взять из лабораторной работы «Исследование САУ с комбинированным управлением».
1. Для приведенной на рис.1 структурной схемы при настройке контура тока на МО (модульный оптимум) требуемый коэффициент регулятора скорости рассчитывается по формуле (для получения МО в контуре скорости):
 Разделить Крс на два сомножителя Крс=К’рсК’’рс, где К’рс = 1/4ТmКдс – постоянная величина,
Разделить Крс на два сомножителя Крс=К’рсК’’рс, где К’рс = 1/4ТmКдс – постоянная величина,
а К’’рс = Тм /Кд Rяц – переменная величина.
2. Подавая на вход САУ скоростью электропривода единичное ступенчатое воздействие, убедиться, что на выходе (скорость) будет переходный процесс с перерегулированием не более 4,3 % и временем» 20 Тm. Также вывести значение тока якоря двигателя.
3. Момент инерции Jд определяет значение постоянной времени Тм, поэтому, изменяя в объекте управления Тм в пределах (0.5¸2.0) Тм, оценить (построить) зависимости перерегулирования (колебательности) и времени регулирования от момента инерции САУ.
4. При построении адаптивного наблюдающего устройства в общем случае объект управления характеризуется передаточной функцией любого порядка. Но степень числителя ее должен быть по крайней мере на единицу меньше степени знаменателя

Коэффициенты Аi и Вi могут быть неизвестны и подлежат восстановлению.
Разделив числитель и знаменатель передаточной функции объекта на полином (n-1) степени (р+l2) (р+l3) ¼(р+ln), где l2, l3,¼ln – действительные и отрицательные корни, и разложив числитель и знаменатель на простые дроби, а также учтя первый корень l1, получим

где а’1=а1+l1, а1=(l2+¼+ln) – А1, b1=B0. Остальные коэффициенты bi и ai связаны сложными полиномами с параметрами Ai, Bi и lI и здесь не приводятся. На основании полученного уравнения можно построить структурную схему наблюдающего устройства (рис.4).
|
|
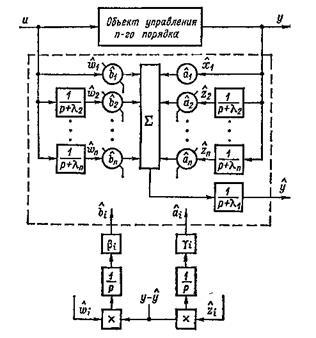
Структурная схема наблюдающего устройства
Рис.4
где:  - оценочные значения параметров аi и bi;
- оценочные значения параметров аi и bi;  - промежуточные переменные; gI, bI – коэффициенты усиления цепей адаптации, предназначенные для настройки параметров
- промежуточные переменные; gI, bI – коэффициенты усиления цепей адаптации, предназначенные для настройки параметров  и
и  . Они выбираются из условия обеспечения минимального времени адаптации при одновременном обеспечении устойчивой работы наблюдателя.
. Они выбираются из условия обеспечения минимального времени адаптации при одновременном обеспечении устойчивой работы наблюдателя.
Для объекта первого порядка, исследуемого в данной лабораторной работе, алгоритм работы наблюдающего устройства может быть описан уравнениями
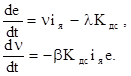
 где: е=w - v и n=(RяцКд/Тм) - (RяцКд/Тм).
где: е=w - v и n=(RяцКд/Тм) - (RяцКд/Тм).
Асимптотическую устойчивость наблюдающего устройства можно проверить с помощью функции Ляпунова в виде положительно-определенной квадратичной формы:

Набрать модель наблюдателя (рис.5) и, изменяя значения параметров l(1000¸10000) и b(500¸2000), добиться устойчивой его работы, при этом время адаптации должно быть намного меньше времени переходного процесса, полученного в п.2.
Модель наблюдающего устройства

Рис.5
Удостовериться, что в точке D значение оцениваемого параметра равно заданному в объекте.
Собрать полную модель системы регулирования совместно с наблюдающим устройством и для различных Jд получить переходные процессы по скорости и току двигателя. Переходные процессы по скорости должны быть одинаковыми.
На рис.6 приведена полная схема электропривода с адаптивным наблюдающим устройством. Следует при моделировании задаться начальными условиями интегратора с параметром b. При этом принять начальные условия, близким или < КдRяц/(Tмb).
Модель ЭП с наблюдателем
|
|


Рис.6
В отчете по лабораторной работе должны быть представлены структурные схемы, модели и переходные процессы исследуемой системы при различных значениях параметров объекта.








