 2020-01-14
2020-01-14 153
153На рис. 5.3.1 представлена модель непрерывной системы управления с запаздыванием.
Сравним результаты полученные с осциллоскопа и LTI-Viewer с расчетной частью (см. пункт 4.2).

Рис. 5.3.3. Математическая модель непрерывной системы управления с запаздыванием
Сравним результаты полученные с осциллоскопа и LTI-Viewer с расчетной частью (см. пункт 4.2).
| Математическая модель непрерывной системы управления с запаздыванием | |
| Результаты расчета | Результаты моделирования |
| Переходная характеристика | |

| 
|
| t рег = 97,2 с, s =12% | 
|
| Нули и полюса | Импульсная характеристика |

| 
|
Моделирование разомкнутой системы управления с запаздыванием
На рис. 5.4.1 представлена математическая модель разомкнутой системы управления с запаздыванием.

Рис. 5.4.1. математическая модель разомкнутой системы управления с запаздыванием
С помощью осциллоскопа и LTI-Viewer получим переходную, импульсную и логарифмические частотные характеристики.
| Математическая модель разомкнутой системы управления с запаздыванием | ||
|
| 
| |
| Переходная характеристика, полученная | Переходная характеристика, полученная с помощью осциллоскопа | |
|
Импульсная характеристика | ||
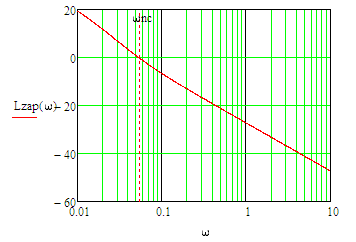
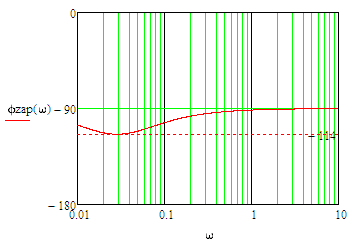
| Логарифмические частотные характеристики | ||
| Результаты расчета | Результаты моделирования | |
|
| |











