 2020-04-12
2020-04-12 645
645Обратимся еще раз к основному уравнению электродвигателя U = Е + IяRя. Выражение для ЭДС двигателя ничем не отличается от выражения для ЭДС генератора. Это и понятно: и в том и в другом случае проводники обмотки пересекают силовые линии магнитного поля. Тот факт, что якорь генератора раскручивается механической, а якорь двигателя—электромагнитной силами, с точки зрения закона электромагнитной индукции не имеет значения. Частота вращения двигателя
n= 
|
|
С практической точки зрения важно представлять условия и способы регулирования частоты вращения двигателя. Выведенная формула позволяет решить эту задачу. Прежде всего отметим, что для уменьшения потерь мощности сопротивление обмотки якоря стремятся сделать по возможности малым (в реальных машинных оно составляет сотые или тысячные доли ом). В соответствии с этим и падение напряжения на активном сопротивлении якоря IЯRЯ невелико по сравнению с напряжением сети. Поэтому в формуле для частоты вращения двигателя произведением IЯRЯ можно пренебречь. Тогда
n= U/(сЕФ).
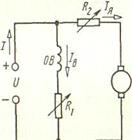
| Рис. 9.27. Включение регулировочных реостатов в схему двигателя постоянного тока параллельного возбуждения |
Таким образом, существует два способа плавного изменения частоты вращения двигателя в широких пределах: 1) изменение напряжения U, подведенного к якорю двигателя; 2) изменение магнитного потока возбуждения Ф (тока возбуждения Iв).
На рис. 9.27 показано возможное подключение регулировочных реостатов к схеме двигателя. Увеличивая сопротивление R2 при постоянном напряжении сети U, уменьшаем напряжение, подведенное к якорю, и частоту вращения двигателя. Увеличивая сопротивление R1, уменьшаем ток возбуждения и магнитный поток возбуждения, а, следовательно, увеличиваем частоту вращения двигателя.
Второй способ регулирования частоты вращения двигателя предпочтительнее, так как он связан с меньшими потерями энергии: ток возбуждения в десятки раз меньше тока якоря, а потери в регулировочном реостате пропорциональны квадрату тока. Однако при необходимости изменения частоты вращения двигателя в очень широких пределах одновременно используют оба способа.
Возможность плавного и экономичного регулирования частоты вращения в широких пределах является важнейшим достоинством двигателей постоянного тока.
Во многих случаях возникает необходимость менять направление вращения якоря электродвигателя. Изменение направления вращения называют реверсированием.
Для реверсирования двигателя постоянного тока следует изменить направление магнитного потока возбуждения или тока якоря. При одновременном изменении направления потока возбуждения и тока якоря за счет изменения полярности напряжения источника питания направление вращения якоря двигателя не меняется.
Реверсирование двигателей осуществляют с помощью переключателей в цепи якоря или в цепи возбуждения.
Выражение для частоты вращения двигателя показывает, что по мере уменьшения магнитного потока возбуждения частота неограниченно возрастает. С этой точки зрения опасен обрыв цепи возбуждения двигателя, при котором магнитный поток резко уменьшается до потока остаточного намагничивания, а двигатель идет «вразнос». Особенно вероятен режим «разноса» у ненагруженного двигателя. Режим «разноса» является аварийным: центробежные силы деформируют обмотку якоря, якорь заклинивается, а в некоторых случаях и разрушается.
У нагруженного двигателя увеличение частоты вращения происходит не столь резко, так как уменьшение магнитного потока при постоянном моменте вращения приводит к такому увеличению тока якоря, при котором произведением IЯRЯ уже нельзя пренебрегать. Но и в этом случае обрыв цепи возбуждения может быть опасным.








