 2020-08-05
2020-08-05 159
159При управлении многогранными объектами мы часто сталкиваемся со следующей картиной:

|

|

|

|

|

|

|

|
Рис.28.Объект управления с двумя входными и двумя выходными переменными
Где Х2-управляющие переменные, Y2-управляемые переменные, U2-прямые связи, Р2-перекрестные связи.
Если для выходной переменной y1 выбрать в качестве регулирующей переменной переменную х2, то за счет перекрестных каналов регулирующая переменная х2 будет оказывать влияние через передаточную функцию W21 на переменную y1, а регулирующая переменная х1 будет влиять через W12на у2. Эти обстоятельства существенно усложняют расчет такого рода системы.
Задача расчета значительно упрощается, если на систему наложить дополнительные требования – требования автономности каналов регулирования. Автономность каналов регулирования можно осуществить за счет введения дополнительных связей между входными переменными, такого рода устройства называются компенсаторами.
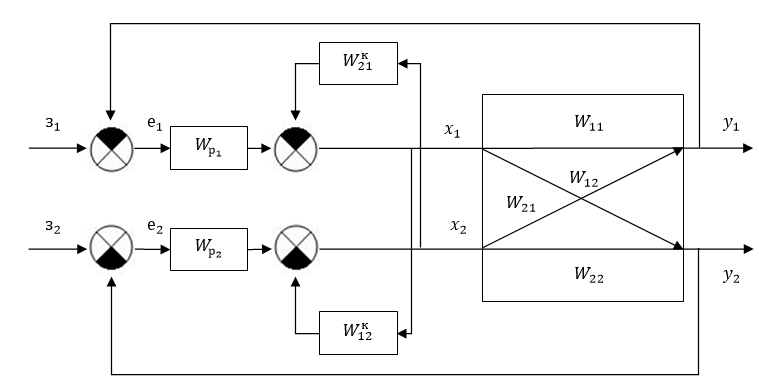
Рис.29.Система управления двумерным объектом
В результате введения компенсаторов появились новые регулирующие переменные, которые влияют на исходные переменные с учетом компенсирующих воздействий.
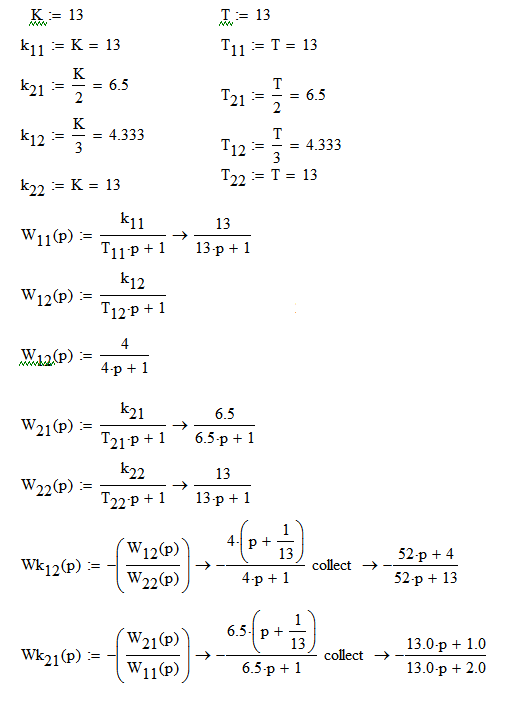
Получим передаточные функции компенсаторов:
Листинг программы Mathcad:
Рассчитываем примеры настройки ПИ-регулятора при помощи стандартных биноминальных форм Ньютона.

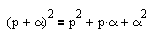
Приравняв полином знаменателя к нулю, получим выражение:
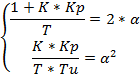

Рассчитаем первый ПИ-регулятор используя систему уравнений:

Проведем моделирование системы в Matlab:
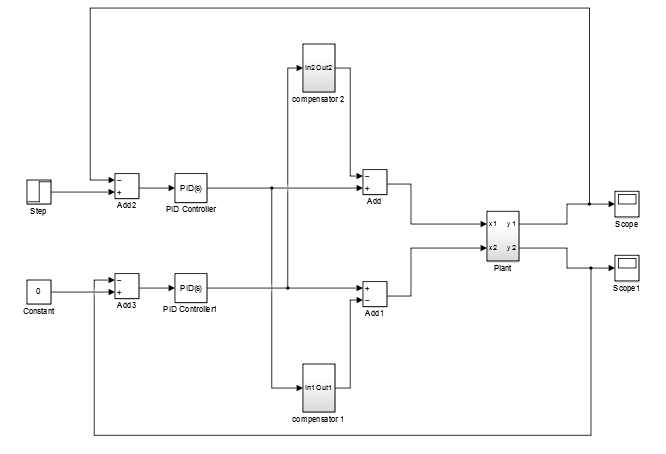
Рис.30.Схема регулирования автономной системы управления со ступенчатым воздействием
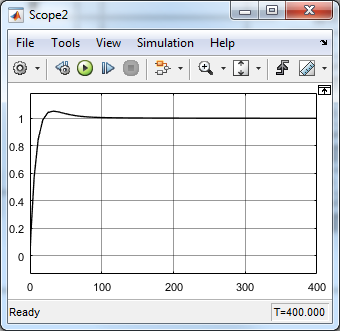

Рис.31. Реакция системы по каналу управление на ступенчатую функцию
Параметры настройки для второго ПИ-регулятора идентичны с первым:
Проведем моделирование в Matlab:

Рис.32. Схема регулирования автономной системы управления с импульсным воздействием
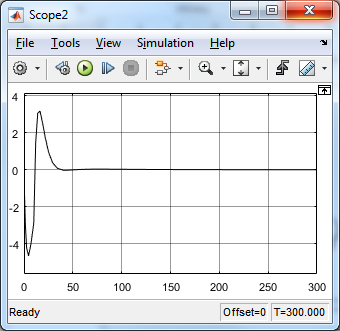
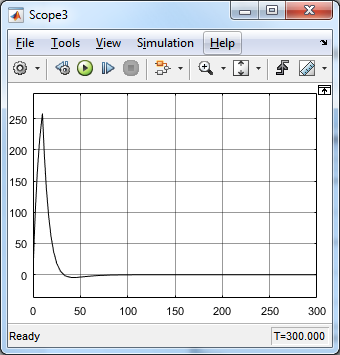
Рис.33. Реакция системы по управления на импульсную функцию
Вывод: были рассчитаны настройки регулятора автономной системы управления. Графики функции выходят на заданные значения, («1», «0») следовательно – система восприимчива к заданию и инвариантна к возмущениям.








