 2020-09-24
2020-09-24 1021
1021Реостатные и потенциометрические датчики служат для преобразования углового или линейного перемещения в электрический сигнал.
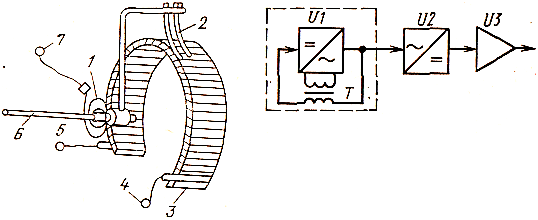
| Рис. 12. Реостатный датчик. 1 - пружина (электропроводная); 2 - перемещающийся контакт; 3 - обмотка на каркасе; 4, 5, 7 - выводы обмотки; 6 - ось |
Реостатный датчик (рис. 12) представляет собой реостат с перемещающимся контактом. Подвижный контакт жёстко укреплён на оси, которая связана с положением механизма. Величина активного сопротивления реостата пропорциональна величине угла поворота подвижного контакта реостата α. В результате при изменении положения механизма изменяется активное сопротивление датчика.
В технике чаще применяется потенциометрический датчик, который представляет собой реостат, включенный по схеме делителя напряжения (рис. 13).
Выходное напряжение потенциометрического датчика в режиме холостого хода, когда нагрузка не подключена, определяется по следующей формуле (рис. 13):
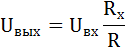
где Uвх - напряжение питания датчика;
Uвых – напряжение на выходе датчика;
R -полное сопротивление датчика;
Rx – сопротивление, введённой части датчика.
| а |
| Uвх |
| R |
| Uвых |
| Rx |
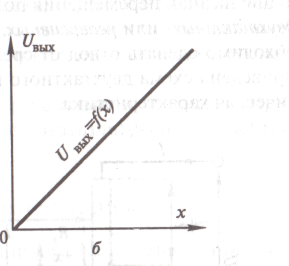
| Рис. 13. Потенциометрический датчик. а – схема включения, б – статическая характеристика. |
Каркас датчиков изготовляется из текстолита, стеклотекстолита, пластмассы и алюминиевых сплавов, покрытых изоляционным лаком или оксидной пленкой.
Каркасы, изготовленные из алюминиевых сплавов, более теплоустойчивы по сравнению с другими каркасами, что дает возможность повысить плотность тока в обмотке и в конечном итоге повысить чувствительность преобразователя. Каркасы могут выполняться в виде цилиндрической или плоской пластины, а также в виде кольца и сегмента. Проволока, которая наматывается на каркас, должна иметь большое удельное сопротивление и малый температурный коэффициент сопротивления. Для обмоток реостатных и потенциометрических датчиков применяется константановая, манганиновая, нихромовая проволока. Для датчиков с малым контактным давлением применяется проволока из сплавов серебра, платины и золота.
Характеристика реостатных и потенциометрических датчиков является ступенчатой, так как непрерывному изменению контролируемого или регулируемого параметра соответствует ступенчатое (дискретное) изменение сопротивления, равное значению сопротивления одного витка.
Это обстоятельство приводит к погрешности измерения, которую можно уменьшить за счет уменьшения диаметра проволоки. Обычно применяется проволока небольшого диаметра (до сотых долей миллиметра). При создании датчиков стремятся к тому, чтобы было как можно больше витков датчика на единицу контролируемого или регулируемого параметра, что приводит к уменьшению ступенчатости характеристики и уменьшению погрешности измерения (как правило, не менее 100...200 витков). Контактирующую с обмоткой часть ползунка часто изготавливают из серебра или сплава платины с серебром. Вместо ползунка в датчике может применяться щетка, которая состоит из нескольких проволочек, соединенных параллельно.
Основаны на изменении индуктивного сопротивления электромагнитного дросселя при перемещении одной из подвижных деталей его, обычно якоря. Они широко применяются для измерения малых угловых и линейных механических перемещений, деформаций, контроля размеров деталей, а также для управления следящими устройствами.
Индуктивный датчик представляет собой электромагнитный дроссель с переменным воздyшным зазором δ, обмотка которого включена последовательно с сопротивлением нагрузки ZН (рис.14). Магнитопровод и якорь обычно выполняют из магнитно-мягкого материала. При изменении воздушного зазора δ (входная величина) меняются индуктивность обмотки дросселя, а также сопротивление его обмотки.
Для индуктивного датчика величина сопротивления:
ХL=2×π×f×L,
где π=3.14, f - частота электрического тока.
L - индуктивность датчика,
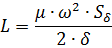
где w – число витков обмотки дросселя, Sδ - площадь сечения воздушного зазора, δ - величина воздушного зазора, µ - магнитная проницаемость сердечника.
Напряжение, снимаемое с датчика Uн=Iн×Zн, где
Ток нагрузки  , где
, где
Zдр - полное сопротивление обмотки дросселя,
Zн - сопротивление активно-индуктивной нагрузки.
Следует отметить, что при уменьшении величины зазора δ индуктивность обмотки дросселя Lдр увеличивается, а это в свою очередь приводит к уменьшению тока нагрузки.
К достоинствам нереверсивного индуктивного датчика следует отнести высокую чувствительность, надежность и долговечность, отсутствие контактных устройств, значительную величину выходной мощности (до сотен вольт-ампер), простоту конструкции и эксплуатации.
Рассмотренные датчики применяют для входных перемещений от 0,001 до 1 мм.
| магнитопровод |
| Uпит |
| обмотка |
| δ |
| якорь |
| Рис.14. Индуктивный датчик |
| Zн |
| Uн |








