2014-02-02
2014-02-02 2025
2025Рис.7 Создание вращающегося магнитного поля
Сердечник статора состоит из спинки (ярма), через которую замыкается магнитный поток вращающегося магнитного поля, и зубцов, между которыми находятся пазы с расположенной в них трехфазной обмоткой (рис.8).
В расточке сердечника статора находится ротор, состоящий из вала, сердечника и обмотки. Обмотка ротора представляет собой короткозамкнутую конструкцию, состоящую из восьми медных или алюминиевых стержней, замкнутых с обеих сторон по торцам медными или алюминиевыми кольцами (см. рис.2). Такая обмотка называется короткозамкнутой.
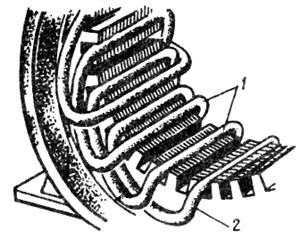
Рис.8 Расположение катушек обмотки в пазах магнитопровода статора:
1 – активные стороны катушек, 2 – лобовые части катушек
При включении обмотки статора в трехфазную сеть возникает магнитное поле, вращающееся с синхронной частотой n1. Поле сцепляется с обмоткой ротора и индуцирует в его стержнях электродвижущие силы, направление которых определяют по правилу «правой руки». Обмотка ротора замкнута, поэтому ЭДС, наведенные в стержнях этой обмотки, создадут в них токи. В результате взаимодействия токов в роторе с вращающимся полем статора на стержнях ротора создаются электромагнитные силы Fэм, направление которых определяют по правилу «левой руки». Совокупность электромагнитных сил Fэм образует на роторе электромагнитный момент М, под действием которого ротор приводится во вращение с частотой n2 в направлении вращения магнитного поля статора. Вращение ротора через вал передается рабочему механизму. Таким образом, электрическая энергия, поступающая из сети в обмотку статора, преобразуется в асинхронном двигателе в механическую энергию вращения.
Отличительный признак асинхронного двигателя состоит в том, что частота вращения n2 ротора меньше синхронной частоты вращения n1 магнитного поля статора.
Объясняется это тем, что ЭДС в стержнях обмотки ротора индуцируется только при неравенстве частот вращения n2 < n1. Частота вращения поля статора относительно ротора определяется частотой скольжения ns = n1 – n2. Отставание ротора от вращающегося поля статора характеризуется относительной величиной s, называемой скольжением:
 (2)
(2)
Скольжение асинхронного двигателя может изменяться в диапазоне от 0 до 1, т.е. 0-100%. Если s≈0, то это соответствует режиму холостого хода, когда ротор двигателя практически не испытывает противодействующего момента; если s=l - режиму короткого замыкания, при котором ротор двигателя неподвижен (n2 = 0). Скольжение зависит от механической нагрузки на валу двигателя и с ее ростом увеличивается.
Скольжение, соответствующее номинальной нагрузке двигателя, называется номинальным скольжением. Для асинхронных двигателей малой и средней мощности номинальное скольжение изменяется в пределах от 0,08 до 0,02, т. е. 8-2%.
Частота вращения ротора асинхронного двигателя согласно (2), об/мин,

При изменениях нагрузки на валу двигателя частота вращения n2 изменяется пропорционально (1-s).
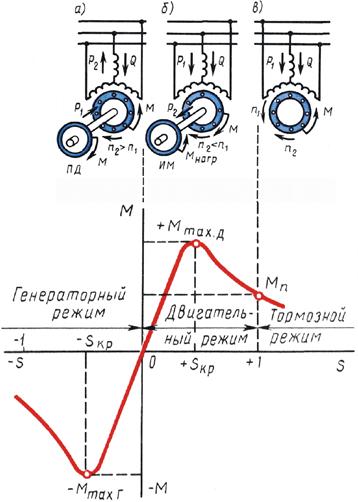
В соответствии с принципом обратимости электрических машин асинхронные машины могут работать как в двигательном, так и в генераторном режимах. Кроме того, возможен еще и режим электромагнитного торможения противовключением.
Двигательный режим. При включении обмотки статора в сеть трехфазного тока возникает вращающееся магнитное поле, которое, сцепляясь с короткозамкнутой обмоткой ротора, наводит в ней ЭДС. При этом в стержнях обмотки ротора появляются токи (см. рис.7). В результате взаимодействия этих токов с вращающимся магнитным полем на роторе возникают электромагнитные силы. Совокупность этих сил создает электромагнитный вращающий момент, под действием которого ротор асинхронного двигателя приходит во вращение с частотой n2 < n1 в сторону вращения поля статора. Если вал асинхронного двигателя механически соединить с валом какого-либо исполнительного механизма ИМ (станка, подъемного крана и т.п.), то вращающий момент двигателя М, преодолев противодействующий (нагрузочный) момент Мнагр, исполнительного механизма, приведет механизм во вращение. Следовательно, электрическая мощность Р1, поступающая в двигатель из сети, в основной своей части преобразуется в механическую мощность P2 и передается исполнительному механизму ИМ (рис.9, б).