 2014-02-02
2014-02-02 1943
1943Устойчивость и управляемость движения
Начнём с понятия устойчивости положения (см. рис. 52).
 Рис. 52 а) Рис. 52 а) |    Рис. 52 б) Рис. 52 б) |
| Рис. к пояснению устойчивости положения при «малых возмущениях» | Рис. к пояснению устойчивости движения |
Среди различных видов устойчивости, наибольшее распространение получило понятие устойчивости по А.М.Ляпунову. Предполагается, что движения исследуемой динамической системы описывается системой обыкновенных дифференциальных уравнений.

 (начальное условие),
(начальное условие),
где  – n -мерный фазовый вектор, u – m- мерный вектор управления, f()- вещественная непрерывная вектор-функция, удовлетворяющая условиям Липшица. Пусть для некоторого заданного закона управления
– n -мерный фазовый вектор, u – m- мерный вектор управления, f()- вещественная непрерывная вектор-функция, удовлетворяющая условиям Липшица. Пусть для некоторого заданного закона управления  t ≥ t 0, через начальное состояние y°( t0)=
t ≥ t 0, через начальное состояние y°( t0)=
проходит невозмущенная (опорная, программная) траектория.
Ставится задача об исследовании поведения невозмущенной траектории в случае, если начальные значения y (t 0) отличаются от .
Невозмущенная траектория y °(t) исходной системы называется устойчивой по Ляпунову, если для любого ε >0 можно подобрать δ (ε, t 0)>0 такое, что для всякого решения y (t) той же системы, начальное движение которого удовлетворяет неравенству:
 y (t 0)- < δ (ε, t 0)
y (t 0)- < δ (ε, t 0)
для всех t ≥ t 0 справедливо:
 y (t, y (t 0), t 0, u °(t)) - y °(t, , t 0, u °(t)
y (t, y (t 0), t 0, u °(t)) - y °(t, , t 0, u °(t) < ε,
< ε,
т.е. близкие по начальным значениям решения остаются близкими для всех t≥t0. Здесь
под нормой  понимается
понимается =
= .
.
Решение y (t, y (t 0), t 0, u °(t)), построенное для заданного программного (опорного)
управления называется возмущенным и исследование устойчивости движения сводится
к анализу свойств решений возмущенного движения. Для проверки свойств возмущенного движения целесообразно сделать замену переменных:
∆y = y (t, y (t 0), t 0, u °(t)) - y °(t, , t 0, u °(t))
и задача сводится к проверке на устойчивость тривиального решения ∆y (t)≡ 0.
Пример устойчивого тривиального решения ∆y (t)≡ 0 при заданном ε > 0 изображен на
рис.53б) для одной из компонент вектора ∆yi (t).
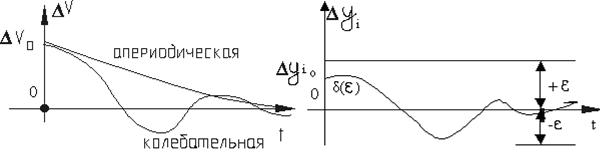
| Рис. 53 а) | Рис. 53 б) |
Аналогичное поведение изображается для всех без исключения компонент вектора ∆y.
Иногда рассматривают частный вид устойчивости только по части компонент вектора ∆y.
Асимптотическая устойчивость предполагает полное устранение возмущения по параметру движения, например уменьшение возмущения по скорости ЛА до нуля ∆V (t)®0 с течением времени t ® ∞ (рис.53а). В общем случае для анализа устойчивости ЛА используется другое определение.
Под устойчивостью ЛА понимается его способность без участия летчика сохранять заданный опорный режим полета и возвращаться к нему после непроизвольного отклонения от него под действием внешних возмущений, при условии прекращения
действия возмущений. Различают устойчивость «в малом» и устойчивость «в большом» соответственно при малых (конечных) и больших возмущениях.
Под управляемостью ЛА понимается его способность выполнять в ответ на целенаправленные действия летчика или автоматики любой, предусмотренный в процессе эксплуатации маневр (причем наиболее просто при минимальных затратах энергии летчика) в любых допустимых условиях полета, в том числе при наличии возмущений.
Управляемость различают: 1. продольную (относительно OZ) или по тангажу;
2. путевую (относительно OY) или по рысканию;
3. поперечную (относительно OX) или по крену.
При решении задач динамики полета обычно на первом этапе определяют потребные (оптимальные) траектории движения ЛА, а затем на втором этапе решаются проблемы реализации этих траекторий на практике. Часто в качестве траекторий движения рассматривают «опорные траектории» и требуемые для их выполнения отклонения органов управления, значения тяги двигателей.
Однако реальные движения ЛА всегда отличается от расчетного опорного из- за отличия характеристик самого ЛА, воздушной среды от опорных (заданных, стандартных), неточностей пилотирования, турбулентности воздуха, разброса тяги двигателей и т.п. Поэтому на втором этапе решается задача управления полетом в условиях, максимально приближенных к реальным. Устойчивость и управляемость ЛА проверяется на первом и втором этапах, особенно тщательно исследуется в задачах реализации потребных траекторий на практике.

