2014-02-03
2014-02-03 31380
31380Такую настройку обычно используют для многоконтурных систем управления с подчиненным регулированием, когда один из регуляторов вырабатывает задающие воздействия для второго, стоящего во внутреннем контуре. При этом каждый контур настраивается индивидуально и параметры регулятора определяются оптимизацией каждого контура.
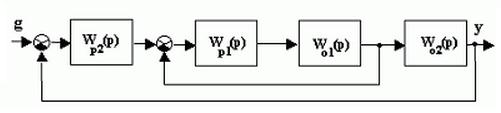
 – стабилизирующий регулятор;
– стабилизирующий регулятор;
 – корректирующий регулятор;
– корректирующий регулятор;
 ,
,  – передаточные функции объекта управления.
– передаточные функции объекта управления.
При оптимизации структуру регулятора внутреннего контура обычно выбирают из условия минимального времени регулирования и перерегулирования ≤4%.
Такая настройка называется технический (модульный) оптимум.
Этому условию соответствует ЛАЧХ, ФЧХ и  системы следующего вида:
системы следующего вида:
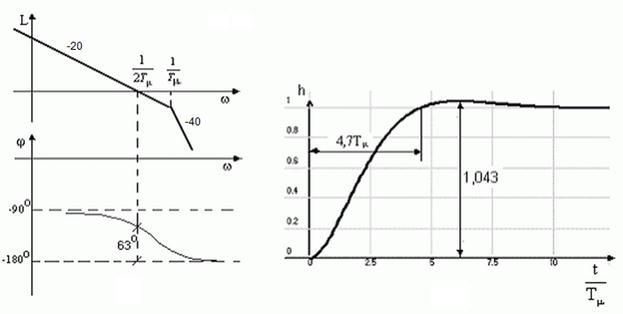
Тогда передаточная функция разомкнутого контура:
Модульный оптимум характеризуется тем, что система в замкнутом состоянии эквивалентна колебательному звену:
 – малая постоянная времени, связанная с временем регулирования, которая должна учитывать все малые постоянные времени настраиваемого контура.
– малая постоянная времени, связанная с временем регулирования, которая должна учитывать все малые постоянные времени настраиваемого контура.
При ступенчатом управляющем воздействии выходная величина в первый раз достигает установившегося значения через время  , перерегулирование составляет 4,3%, а запас по фазе 63°.
, перерегулирование составляет 4,3%, а запас по фазе 63°.
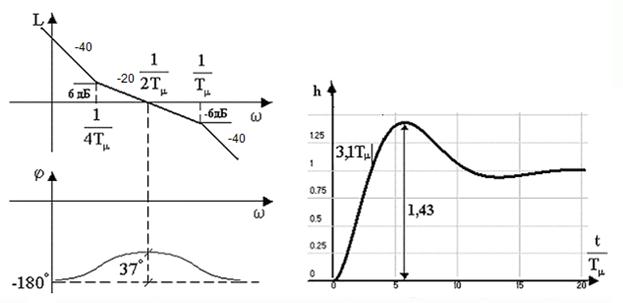
Настройка регуляторов на симметричный оптимум
При такой настройке ЛАЧХ желаемой системы имеет астатизм 2-го порядка, время первого достижения выходной величиной установившегося значения составляет  , максимальное перерегулирование достигает 43%, запас по фазе 37° но при этом в системе переходной процесс с перерегулированием до 40% и выше.
, максимальное перерегулирование достигает 43%, запас по фазе 37° но при этом в системе переходной процесс с перерегулированием до 40% и выше.