 2014-02-24
2014-02-24 621
621Уравнение цепной линии в общем случае:
Граничные условия для цепной линии:
1) при х=0: у=0; у+x=усм=x=ach(с/а); х+с=хсм=с;
2) при х=х2: у=h; у+x=усм=h+x=ach(х2+с)/а; х+с=хсм=х2+с;
3) при х+с=хсм=0, т.е. х=-с: ch(х+с)/а=ch0=1; у+x=усм=а.
Исходя из этих условий, а также имея в виду, что длина дуги  находим:
находим:
 (2.87).
(2.87).
Если обозначить х0/2а=Z, то получим:
 .
.
Для определения Z в литературе имеется график Z=f(shZ/Z).
Далее находим также:
 (2.88).
(2.88).
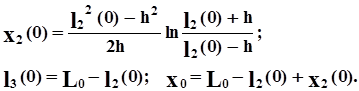
В частном случае, когда часть цепи лежит на грунте и цепная линия в точке 0 касается оси х, проекция цепной линии на ось х равна
 .
.
Подставляя х2 в уравнение и используя соотношение
 , находим:
, находим:
 .
.
При этом x=а.
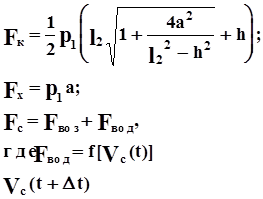
В общем случае горизонтальная составляющая натяжения якорной цепи в произвольной точке:
Fх=р1а,
а полное натяжение якорной цепи
F=р1(у+x) (2.89).
Подставляя в последнее выражение у=h и значение x, найдем натяжение якорной цепи у клюза
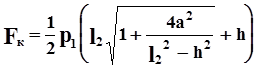 (2.90).
(2.90).
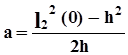
В частном случае, когда часть цепи лежит на грунте, подставляя в предыдущее выражение значение “а”, получим:
 .
.
Для решения системы применяется метод Эйлера.
Расчет I ст.
Судно несколько раз разгоняется и замедляется движение, а якорная цепь поднимается и снова ложиться на грунт.
Т.к. l3=х3, то из 4-го и 5-го уравнений системы получаем:
l2-х2=L0-l1-х0+х1.
Уравнение, характеризующее состояние цепной линии:
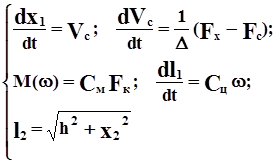
Тогда система уравнений для I ст.:
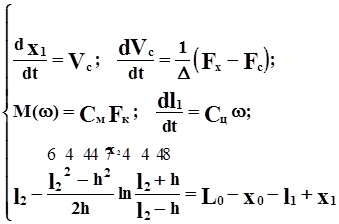
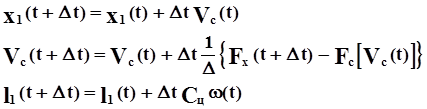
Решения дифференциальных уравнений в конечных приращениях:
Порядок расчета:
1) Определяем начальные значения параметров, характеризующих состояние системы судно-якорная цепь-якорный механизм при t=0:
х1(0)=l1(0)=Vс(0)=0;
Fс(0)=Fх(0);
Fс(0)=Fвоз+Fвод,
где Fвоз=const, а Fвод=f(Vтеч) т.к. Vс(0)=0.
Из 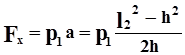 находим:
находим:
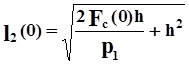 .
.
Тогда
При t=0 натяжение может оказаться настолько большим (величина силы Fс), что участок якорной цепи на грунте будет отсутствовать, т.е. l3(0)=0 и I ст. также отсутствует. В этом случае надо сразу переходить к расчету II ст. Если же l3(0)=[L0-l2(0)]>0, то продолжают расчет I ст.
2) Определяем начальное значение усилия на клюзе:
,
куда необходимо подставить
 .
.
Тогда получим:
 ;
;
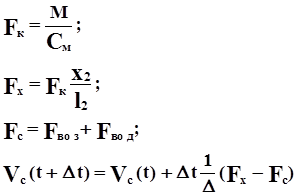
3) Из соотношения
М(w)=СmFк определяем М(0).
По характеристикам электродвигателя w(М) и w(I) определяем w(0) и I(0).
Т.о. имеем все начальные значения для t=0.
4) Задавшись шагом Dt, находим
х1(0+Dt); l1(0+Dt).
Определяем l2(0+Dt) из последнего уравнения системы для I ст. Графическое решение уравнения приведено у Фрейдзона.
5) Находим усилия и Vс
Fк(0+Dt); Fх(0+Dt); Fс(0+Dt); Vс(0+Dt);
6) М(0+Dt)=СмFк(0+Dt); w(0+Dt); I(0+Dt).
На этом первый шаг вычислений заканчивается. Далее выполняется второй шаг. Расчет ведем до тех пор, пока вся цепь не поднимется с грунта. Условие окончания расчета I ст.:
l3(t)=L0-l1(t)-l2(t)£0.
Если условие выполняется, то переходят к расчету II ст.
Расчет II ст.
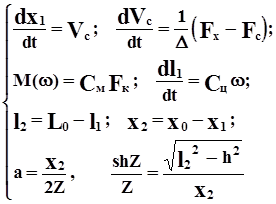
Характерной особенностью здесь является отсутствие якорной цепи на грунте. Система уравнений для II ст.:
Порядок расчета:
1) в качестве начальных значений переменных t, х1, l1, Vс берем значения величин из последнего шага вычислений для I ст.
2) задавшись Dt, находим х1(t+Dt); х2=х0-х1; l1(t+Dt); l2=L0-l1;
3) из уравнения 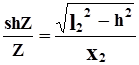 находим Z. Графическое решение уравнения приведено у Фрейдзона. Определяем параметр цепной линии а.
находим Z. Графическое решение уравнения приведено у Фрейдзона. Определяем параметр цепной линии а.
4) находим усилия и Vс.
5) определяем М(t+Dt)=СмFк;
По характеристикам электродвигателя w(М) и w(I) находим w(t+Dt) и I(t+Dt).
На этом первый шаг вычислений заканчивается. Расчет ведем до момента, когда  .
.
Расчет III ст.
Система уравнений для III ст.:
Порядок расчета:
1) в качестве начальных значений переменных берем значения величин из последнего шага вычислеий для II ст.
2) задавшись Dt, находим х1(t+Dt); х2=х0-х1;  ; l1=L0-l2.
; l1=L0-l2.
3) Dl1=l1(t)-l1(t+Dt);
По величине Dl1, пользуясь выражением  , определяем среднюю частоту вращения электродвигателя.
, определяем среднюю частоту вращения электродвигателя.
4) по характеристикам электродвигателя w(М) и w(I) находим М и I.
5) находим усилия и Vс.
Расчет ведем до момента, когда l2=h и х1=х0.
Расчет IV ст.
Порядок расчета:
1) в качестве начальных значений переменных берем значения величин из последнего шага вычислений для III ст.
2) Fк=0.87(Gя+рl2)
3) М=СмFк;; w; I
4) l1(t+Dt)=l1(t)+DtCцw(t);
l2=L0-l1
Расчет заканчиваем когда l2(t)=0
Зависимость m=f(t) имеет вид, показанный на рис.49
Проверки:
I. Т£Тту
II.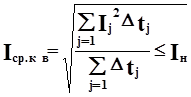 .
.
Аналогичная проверка делается для режима подъема двух якорей с половины условной глубины.
III. Проверки для режима швартовки
 ,
,
Vшн=0.2¸0.3 м/с;
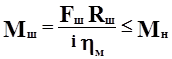
2Мш£Мпуск.АД;  ,
,
где Fш - номинальное тяговое усилие в швартовном троссе.
Обычно задаются Fш исходя из обеспечения прочности тросса при швартовке.
Fш£0.25F разрывное,
где  ;
;
а2, в2 - коэффициенты, значения которых приведены в справочниках.
Принимают Fш=0.1¸0.2Fр.
Далее по Мш®nш®Vш.
Vш должна»Vш рег.
Аналогично по nmax®Vшmax³Vшmax.рег.
Литература
1. Фрейдзон И.Р. Судовые автоматизированные электроприводы и системы. “Судостроение”, 1967, 1974, 1980, 1988
2. Сиверс П.Л. Судовые электроприводы “Транспорт”, 1962, 1975
3. Хомяков Н.М., Михайлов В.С. Судовые электроприводы. “ Судостроение”, 1969
4. Судовые электроприводы. Справочник. Т.1,2. Под редакцией И.Р. Фрейдзона, “Судостроение”, 1975, 1984
5. Справочник судового электротехника. Под общей редакцией Г.И. Китаенко. Т1,2. “Судостроение”, 1975, 1980.
6. Справочник по судовым устройствам. Авт.: А.Н.Гурович и др. “Судостроение”, 1975, 1967.
7. Шмаков М.Г. Рулевые устройства судов. “Судостроение”, 1968
8. Шмаков М.Г. Судовые устройства. “Транспорт”, 1977
9. Завиша В.В., Декин Б.Г. Судовые вспомогательные механизмы. “Транспорт”, 1974.
10. Краковский И.И. Судовые вспомогательные механизмы. “Транспорт”, 1972








