 2014-02-09
2014-02-09 3511
3511Ротор синхронного двигателя вращается с той же скоростью, что и магнитное поле машины. Синхронное вращение можно объяснить взаимодействием полюсов ротора и полюсов результирующего вращающегося поля. Вращающееся магнитное поле вследствие взаимодействия полей статора и ротора увлекает за собой ротор. При нагрузке двигателя под воздействием тормозного момента его ротор, продолжая вращаться синхронно, смещается относительно результирующего поля машины на угол θ. Чем больше нагрузка на валу, тем больше угол θ. Под углом θ, как и раньше, понимается угол между осью полюсов ротора и осью результирующего поля. Но в отличие от генератора, где ротор опережает поле, в двигателе он отстает от поля, т. е. является ведомым, поэтому для двигателей этот угол принимают отрицательным.
На рис. 2 даны две векторные диаграммы, одна из которых (рис. 2, а) соответствует режиму работы генератора параллельно с сетью, а другая (рис. 2,6) — двигательному режиму. На рис. 2, а ротор опережает результирующее поле (Е 0 опережает U (г)), а на рис. 2,6 отстает от него (Е 0 отстает от U( Д)). Под U (г) и U( Д) понимаются напряжения на выводах машины, уравновешивающие напряжения сети U (г)=— U C и U( Д) =— U C.
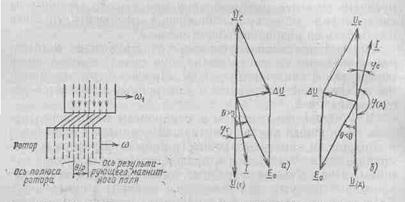
| Рис. 1. Распределение магнитного поля в воздушном зазоре синхронного двигателя при нагрузке | Рис. 2. Упрощенные векторные диаграммы синхронной машины для генераторного (а) и двигательного (б) режимов |
На рис. 2,6 в соответствии с изменением фазы  изменяется фаза тока I. Мощность, отдаваемая машиной в сеть, будет теперь отрицательной:
изменяется фаза тока I. Мощность, отдаваемая машиной в сеть, будет теперь отрицательной:  , а мощность, поглощаемая из сети, положительной:
, а мощность, поглощаемая из сети, положительной:  . Эти неравенства подтверждают, что машина в данном случае (когда θ <0) будет работать двигателем. При построении векторных диаграмм синхронных двигателей принято фазу тока определять по отношению к вектору напряжения сети U C. Построение векторных диаграмм синхронного двигателя при известных U (Д), I и угле между ними выполняется так же, как и для генератора (левая часть рис. 3), исходя из уравнения
. Эти неравенства подтверждают, что машина в данном случае (когда θ <0) будет работать двигателем. При построении векторных диаграмм синхронных двигателей принято фазу тока определять по отношению к вектору напряжения сети U C. Построение векторных диаграмм синхронного двигателя при известных U (Д), I и угле между ними выполняется так же, как и для генератора (левая часть рис. 3), исходя из уравнения
 (1)
(1)
Если при построении диаграммы исходить из известного напряжения сети U С = U, то уравнение (1) будет иметь вид
 (2)
(2)
Диаграмма по уравнению (2) построена в правой части рис. 3, причем для опережающего тока якоря. На рис. 3 показаны векторы МДС обмотки возбуждения и составляющих реакции якоря.
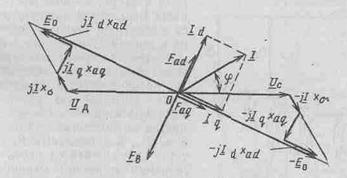
Рис. 3. Векторная диаграмма явнополюсного синхронного двигателя
Первый вектор отложен в сторону опережения ЭДС E Q на 90°, а два других - в фазе с токами I d и I q. Из рис. 3 видно, что продольная реакция якоря в синхронном двигателе при опережающем токе действует размагничивающим образом (F ad направлен против F B). Аналогично можно показать, что при отстающем токе продольная реакция якоря будет оказывать намагничивающее действие.
Эти выводы расходятся с выводами о влиянии реакции якоря на поле возбуждения, которые были получены для генератора. Однако это расхождение не вызвано различием в физических явлениях, а связано с различным отсчетом фазы тока в двигателе и генераторе. В двигателе фаза тока определяется по отношению к напряжению сети  , а в генераторе — по отношению к собственному напряжению, находящемуся в противофазе с напряжением U C. Поэтому опережающему току в двигательном режиме соответствует отстающий ток в генераторном режиме.
, а в генераторе — по отношению к собственному напряжению, находящемуся в противофазе с напряжением U C. Поэтому опережающему току в двигательном режиме соответствует отстающий ток в генераторном режиме.
3. Угловые и U -образные характеристики синхронного двигателя
Синхронный двигатель потребляет электрическую мощность Р 1 из сети. Часть этой мощности расходуется на электрические потери в обмотке якоря P эа и магнитные потери Р M в статоре, а остальная ее часть передается вращающимся магнитным полем от статора к ротору. Эта мощность называется электромагнитной. Электромагнитная мощность РЭМ преобразуется в механическую, развиваемую ротором. Частично мощность РЭМ расходуется на покрытие механических Р MX и добавочных Р Д потерь. Оставшаяся ее часть Р 2 является полезной механической мощностью на валу двигателя. Указанное преобразование мощности в синхронном двигателе показано на рис. 4.

Рис. 4. Энергетическая диаграмма синхронного двигателя
Уравнения для электромагнитной мощности синхронного двигателя можно получить из векторных диаграмм. Например, для явнополюсного двигателя электромагнитная мощность равна:
 (3)
(3)
В неявнополюсном двигателе x q= х d, и поэтому вторая составляющая Р" будет отсутствовать. Электромагнитный момент получим, если (3) разделим на угловую скорость поля и ротора  :
:
 (4)
(4)
В двигателе электромагнитный вращающий момент направлен в сторону вращения, тогда как в генераторе — против вращения. В явнополюсном двигателе за счет второй составляющей М" (реактивного момента) вращающий момент может создаваться и при отсутствии возбуждения I B=0 (E 0=0). Напомним, что в (3) и (4) угол θ следует принимать отрицательным.
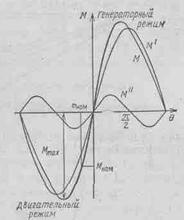
Рис. 5. Угловая характеристика электромагнитного момента явнополюсного синхронного двигателя
На рис. 5 показана угловая характеристика M=f(θ) для двигательного режима (нижняя часть). Для сопоставления там же приведена аналогичная характеристика для генератора. Утолщенная часть кривой соответствует устойчивой части характеристики. Величина МMAX характеризует перегрузочную способность машины. Отношение МMAX / МHOM называется кратностью максимального момента. Согласно ГОСТ 183-74 эта кратность должна быть не менее 1,65. Из (4) видно, что МMAX в синхронных двигателях прямо пропорционален подводимому напряжению U и ЭДС E 0. Это относится как к неявнополюсному двигателю, так и с некоторым приближением к возбужденному явнополюсному двигателю, так как у последнего МMAX определяется главным образом первой составляющей. Зависимость M=f(θ), представляющая собой угловую характеристику синхронного двигателя, является его механической характеристикой. При номинальной нагрузке θ HOM=20÷300.
U-образные характеристики двигателя могут быть построены по векторным диаграммам. Более точные результаты получаются из векторных диаграмм с учетом насыщения. U -образные характеристики для различных значений Р (или М) представлены на рис. 7. Как следует из сопоставления рис. 6 и 7, при работе с опережающим током двигатель перевозбужден, а при работе с отстающим током недовозбужден.
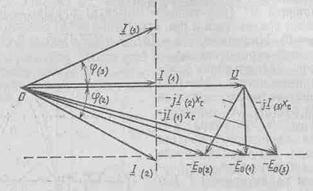
Рис. 6. Векторные диаграммы ненасыщенного неявнополюсного двигателя при Р=const
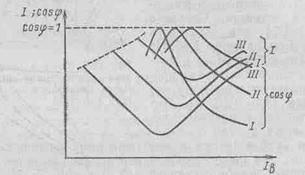
Рис. 7. Зависимости I=f(IB) и cos φ=f(IB) для синхронного двигателя при различных значениях Р(М): 1 - при P1(M1); 2 - при Р 2> Р 1 (М 2> М 1); 3 - при Р 3> Р 2 (М 3> М 2)
При перевозбуждении двигатель генерирует реактивную мощность непосредственно у потребителя, что способствует повышению cos φ сети. Это позволяет снизить реактивную мощность, вырабатываемую синхронными генераторами на электрических станциях, и уменьшить потери в линиях электропередачи. Возможность генерировать реактивную мощность выгодно отличает синхронные двигатели от асинхронных, которые потребляют реактивную мощность для возбуждения. Поэтому синхронные двигатели проектируются для работы при номинальной мощности с перевозбуждением (с опережающим током) и cos φHOM =0,9. Работа с перевозбуждением предпочтительна также и для повышения максимального момента двигателя.
В соответствии с приведенными U -образными характеристиками на рис. 7 построены зависимости cos φ=f(IB) при различных значениях М. Отсюда следует, что при любых нагрузках на валу синхронные двигатели могут работать с различными значениями cos φ, в том числе и с cos φ =1. Достигается это изменением тока в обмотке возбуждения.
4. Рабочие характеристики синхронного двигателя
Рабочие характеристики синхронного двигателя могут быть получены или при I B=const, или при cos φ = const. На рис..8 показаны рабочие характеристики М, I B, Р 1, I, η=f(P2) при условии U=const и cos φ =cos φHOM=const.
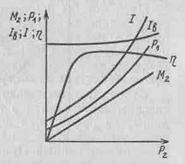
Рис. 8. Рабочие характеристики синхронного двигателя при cos φ = const
Зависимость момента на валу М2≈М от полезной мощности имеет линейный характер, так как скорость ω1=const  . Как следует из рис. 7, для поддержания cos φ = const с увеличением нагрузки ток возбуждения I B следует увеличивать.
. Как следует из рис. 7, для поддержания cos φ = const с увеличением нагрузки ток возбуждения I B следует увеличивать.
При холостом ходе (Р2=0) двигатель потребляет из сети активную мощность, необходимую для покрытия потерь (механических и магнитных) внутри машины. Поэтому при холостом ходе ток статора не будет равен нулю. С возрастанием Р 2 будет увеличиваться Р 1, а следовательно, и ток ( где
где  включает в себя как потери холостого хода — постоянные потери, так и электрические потери в обмотке якоря).
включает в себя как потери холостого хода — постоянные потери, так и электрические потери в обмотке якоря).
Зависимость КПД от Р 2 не отличается от таковой для других машин. Обычно синхронные двигатели работают с постоянной скоростью. При необходимости регулировать скорость применяют частотный способ, при котором изменяют скорость поля, а следовательно, и скорость ротора.

