 2014-02-09
2014-02-09 501
501Дано: Структурная схема механизма, функция положения выходного звена j 3 = П (j 1) на рабочем перемещении D j 3 при начальном положении j 30 .
Определить: Размеры звеньев механизма, обеспечивающие наилучшее приближение к заданной функции.
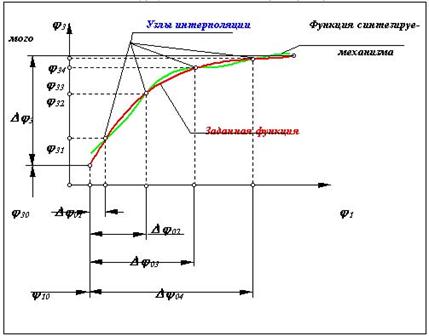
Предположим, что синтезируется четырехшарнирный механизм. Тогда необходимо определить размеры всех четырех звеньев механизма и начальное значение обобщенной координаты j 10, т.е. пять неизвестных. Так как решается задача метрического синтеза, а абсолютные размеры звеньев определяются прочностными характеристиками, рабочими нагрузками и материалами, то целесообразно перейти к относительным размерам звеньев, приняв длину одного из них (например, стойки) равной единице. Общее число неизвестных, таким образом, сократится до четырех. Изобразим расчетную схему синтезируемого механизма и заданную функцию положения (рис. 10.18). Выберем на функции положения случайным образом (либо по какой-нибудь стратегии) четыре точки с координатами выходного звена j 31 ,j 32 ,j 33, j 34 . Для каждого из положений можно записать векторное уравнение или два уравнения в проекциях на оси координат (ось абсцисс совпадает с вектором l0):
l1 + l2 = l3 + l0 , l1 * sin j 1 + l2 * sin j 2 = l3 * sin j 3 ,
l1 * cos j 1 + l2 * cos j 2 = l3 * cos j 3 + l0.

|
|
В число неизвестных в рассматриваемой задаче входят l1, l2, l3 и j 10, l0 считаем заданным, приращения углов D j i1 определяются по заданной функции положения по выбранным значениям j 3i . Для определения четырех неизвестных необходимо задать как минимум четыре точки на заданном участке функции положения. По этим точкам составим систему четырех векторных уравнений

|
где второе уравнение каждой подсистемы в поекциях позволяет определить угол j 2i.
Из этой системы определим размеры звеньев механизма и начальное значение координаты j 10. Функция положения синтезированного таким образом механизма будет совпадать с заданной функцией в выбранных точках – узлах интерполяции. Наибольшие отклонения заданной и полученной функций будут находится между узлами интерполяции (рис.10.18). Изменяя положение узлов интерполяции в пределах рабочего перемещения выходного звена можно уменьшать отклонения полученной функции положения от заданной. При использовании метода наименьших квадратов число точек должно быть больше чем число неизвестных (хотя бы на единицу). Полученная функция положения при этом проходит не через узлы интерполяции, а так чтобы отклонения сумма квадратов отклонений в заданных точках была минимальна.








