2014-02-10
2014-02-10 484
4843.1. Пространство весов
Мы уже обсуждали тот факт, что вектор образа X представляется как точка в пространстве образов и что пространство может быть разбито на подобласти для образов, принадлежащих различным категориям. Решающая поверхность, которая делит пространство может быть линейной, кусочно-линейной или нелинейной и может быть в общем виде представлена как:
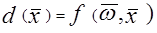
где 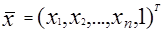 и
и

представляют собой образ и весовой вектор. Проблема обучения системы состоит в том, чтобы найти вектор W, показанный на рис.3.1 на основе априорной информации, полученной от обучающей выборки. Возможно и даже более удобно исследовать поведение обучающих алгоритмов в пространстве весов. Пространство весов есть (n+1) - размерности Эвклидова пространства, в котором координаты w1 w2... wn+1. Для каждого прототипа  , k=1,2,...,M, m=1,2,...,Nk (где M представляет число категорий и Nk представляет собой число прототипов, принадлежащих к категории K, в пространстве W ( пространство весов) имеется гиперплоскость, в которой
, k=1,2,...,M, m=1,2,...,Nk (где M представляет число категорий и Nk представляет собой число прототипов, принадлежащих к категории K, в пространстве W ( пространство весов) имеется гиперплоскость, в которой

любой весовой вектор W на положительной стороне гиперплоскости дает wТz..> 0. Т.е., если прототип принадлежит категории w1, любой весовой вектор W на этой стороне гиперплоскости будет вероятно классифицировать . Аналогичные аргументы могут быть рассмотрены для любого весового вектора на другой стороне гиперплоскости, где wТz..< 0.
Возьмем 2-х классовую проблему для иллюстрации. Предположим, что мы имеем последовательность N1 образов, принадлежащих w1 с общим числом образов N = N1 + Nl. Предположим также, что w1 и w2 -два линейно разделяемых класса. Тогда может быть найден вектор w, такой,что:

и

где. и
и  представляют собой категории w1 и w2 соответственно.
представляют собой категории w1 и w2 соответственно.
В общем, для N образов имеется N гиперплоскостей в весовом пространстве. Область решения для категории w1 в W - пространстве это область, которая лежит на положительной стороне N1 гиперплоскостей для категории w1 и на отрицательной для N2 гиперплоскостей для категории w2. Предположим, что мы имеем три прототипа Z1, Z2, Z3 и знаем, что все они принадлежат категории w1. Три гиперплоскости могут быть нарисованы в W - пространстве, как показано на Рис.3.1а, заштрихованная область на Рис.3.1а показывает решающие области в двухклассовой проблеме. В этой области

 и
и

Т.е. любое  в этом районе будет вероятно классифицировать прототипы Z1, Z2, Z3 как принадлежащие w1, в то время как поперечно заштрихованные области, показанные на рис.3в
в этом районе будет вероятно классифицировать прототипы Z1, Z2, Z3 как принадлежащие w1, в то время как поперечно заштрихованные области, показанные на рис.3в
d1
d2
но d3 ® любой w из этой области будет классифицировать Z1 и Z2 как принадлежащий категории w1 и классифицировать Z3 как относящийся к категории w2.
® любой w из этой области будет классифицировать Z1 и Z2 как принадлежащий категории w1 и классифицировать Z3 как относящийся к категории w2.
Как обсуждалось в части 2 решающая поверхность для двухклассовой задачи предполагает, что d(w,x) будет больше 0 для всех образов из одного класса и меньше 0 для образов, принадлежащих к другому классу. Но если все  заменить на их отрицательные значения - , то решающая поверхность может быть обобщена как часть w пространства, в котором:
заменить на их отрицательные значения - , то решающая поверхность может быть обобщена как часть w пространства, в котором:
wTzñ0 " =
= -
- 
наша проблема становится в нахождении w, которое обеспечивает положительность всех неравенств.
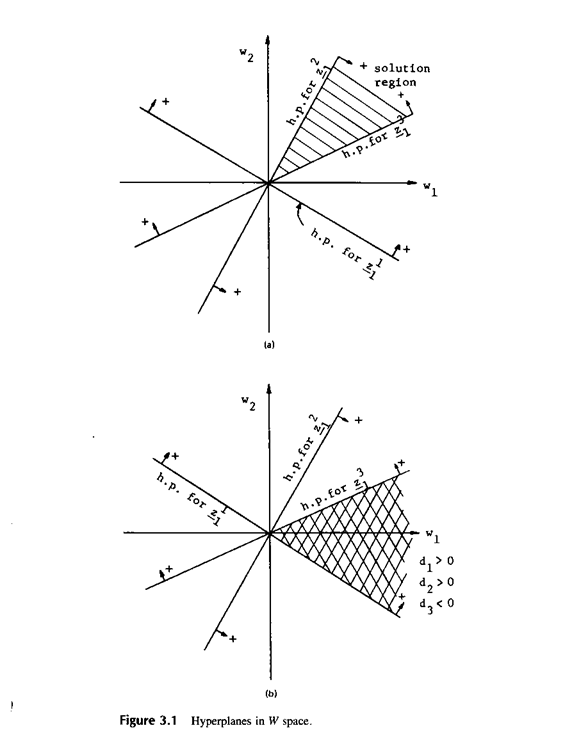
Иногда может быть желательно иметь ограничение (порог) в дискриминантной функции, такой что:
 , (3.6)
, (3.6)
где T>0 ограничение (порог). Любой  , удовлетворяющий неравенству (3.6) является весовым вектором решения. Решающая область теперь изменяется так, как показано на рис.3.2.
, удовлетворяющий неравенству (3.6) является весовым вектором решения. Решающая область теперь изменяется так, как показано на рис.3.2.
В заштрихованной области: оба  и
и  - положительные, в то время как
- положительные, в то время как  отметим, что вдоль исходной гиперплоскости образа
отметим, что вдоль исходной гиперплоскости образа
 , (3.7)
, (3.7)
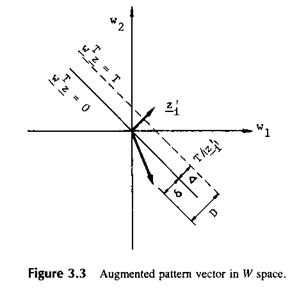
и что вектор Z (расширенный Z) является перпендикулярным к гиперплоскости  и направлен в ее положительную сторону. Тогда линия
и направлен в ее положительную сторону. Тогда линия  отстоит от на расстояние
отстоит от на расстояние  . Доказательство этого оставим читателю.
. Доказательство этого оставим читателю.
3.2. Процедура обучения с коррекцией ошибок
Очевидно, что для случая двух классов ошибка может существовать, если 
 .
.
Тогда нам необходимо подвинуть весовой вектор в положительную сторону гиперплоскости для , другими словами передвигаем вектор W в область правильного решения. Наиболее прямой путь сделать это - передвинуть W в направлении перпендикулярном к гиперплоскости (т.е. в направлении от или -). Вообще коррекция W может быть сформулирована следующим образом:
заменить W(k) на W(k+1), так что
 , если
, если 
 , если
, если 
 , если классифицировано правильно,
, если классифицировано правильно,
где  и
и  - весовые вектора на k-ом и (k+1)-ом шагу коррекции, соответственно. Добавление корректирующего члена
- весовые вектора на k-ом и (k+1)-ом шагу коррекции, соответственно. Добавление корректирующего члена  заставляет вектор
заставляет вектор  двигаться в направлении
двигаться в направлении  . Аналогично, вычитание корректирующего члена передвигает вектор направлении -
. Аналогично, вычитание корректирующего члена передвигает вектор направлении - .
.
В течение этой обучающей процедуры образы представляются по одному, всего N=N1 + N2 прототипов (обучающих образов). После одной итерации все образы представляются снова в той же последовательности, чтобы получить новую итерацию.
Существует несколько правил выбора величины С:
- правило с фиксированной коррекцией,
- правило абсолютной коррекции,
- правило частичной коррекции.
3.2.1. Правило с фиксированной коррекцией
В этом алгоритме С - выбирается как фиксированная положительная константа. Этот алгоритм начинается с любого w(0) и выражение (3.10) применяется к обучающей последовательности P, P =  .
.
В целом процесс настройки весов будет закончен за конечное число шагов. Выбор С для этого процесса не очень важен. Если теорема сходимости справедлива для С=1, то она будет справедлива для любого С ¹1, так как изменение С фактически масштабирует все образы без изменения их разделимости.
3.2.2. Правило абсолютной коррекции
В этом алгоритме Свыбирается как наименьшее целое число, которое передвигает поперек гиперплоскости образа в область решения w каждый раз как классификатор делает ошибку. Пусть  - среднее из векторов, которые не удовлетворяют неравенству w ´ z ³T. Константа С выбирается так, что
- среднее из векторов, которые не удовлетворяют неравенству w ´ z ³T. Константа С выбирается так, что

 ,
,
поэтому
Если Т=0,  должно быть больше 0 или
должно быть больше 0 или  . Взяв абсолютную величину в (3.3) получаем
. Взяв абсолютную величину в (3.3) получаем
 .
.
Правило абсолютной коррекции также дает решающий весовой вектор за конечное число шагов.
3.2.3. Правило с частичной коррекцией
В W пространстве расширенный вектор образа Z - перпендикулярен гиперплоскости  и направлен в положительном направлении, как показано на рис.3.3.
и направлен в положительном направлении, как показано на рис.3.3.
 |
Расстояние от до желаемой гиперплоскости будет:
 (3.15)
(3.15)
Когда находится на другой стороне гиперплоскости
В алгоритме с частичной коррекцией С - выбрано так, что  двигается на часть расстояния в направлении нормали к желаемой гиперплоскости. То есть
двигается на часть расстояния в направлении нормали к желаемой гиперплоскости. То есть
и
-= 
Если порог положить равным 0, то:
можно видеть, что когда l=1 коррекция происходит до гиперплоскости (правило абсолютной коррекции) и когда l<1 коррекция короче, чем до гиперплоскости (under relaxation), когда l>1 коррекция больше чем до гиперплоскости, (over relaxation).
Для 0<l<2 правило частичной коррекции будет или заканчиваться на весовом векторе в конечное число шагов или сходиться к точке на границе решающего пространства весов.
Процедура обучения для всех перечисленных 3-х алгоритмов выглядит следующим образом:
1) Взять любой из обучающей последовательности и проверить d(z), для определения класса (предполагается М=2).
2) Если получен правильный ответ, переходим к следующему
3) Если имеет место ошибочнаяклассификация, изменяем w(k) на w(k+1).
4) После того, как будут проверены все из обучающей последовательности, повторяем все процедуры заново в том же порядке. Если линейно разделимы, все три алгоритма будут сходиться к правильному .
На рис 3.4. показаны шаги коррекции для трех различных алогритмов. Абсолютная коррекция заканчивается за 3 шага, в то время как частичная за 4 шага.
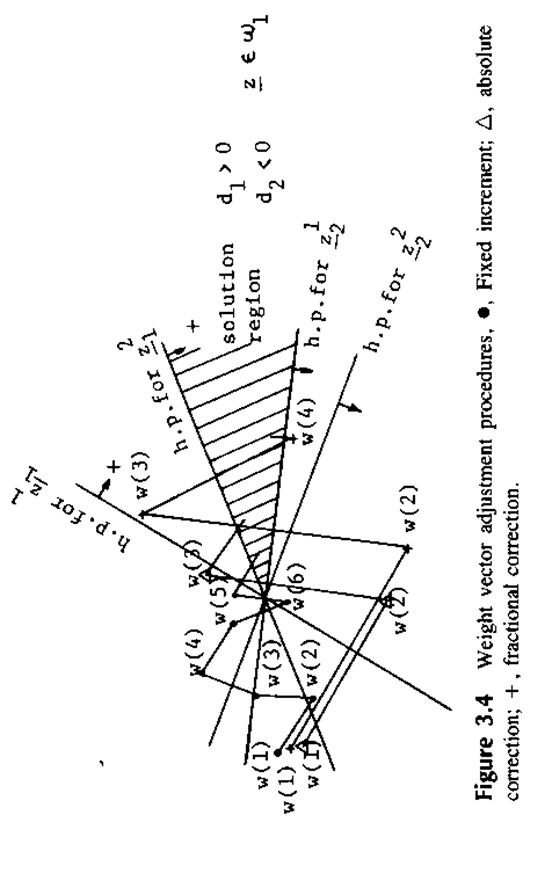
Рис 3.4.
Для количества классов больше 2 (M>2) может быть предложена подобная процедура. Предположим, что мы имеем обучающую последовательность для всех образов классов wi i=1,2,...,M.
Вычислим дискриминантные функции
di()= , i=1,2,...,M
, i=1,2,...,M
Очевидно, мы желаем:
di()>dj() Î 
3.3. Градиентные методы
3.3.1. Общий метод градиентного спуска
Метод градиентного спуска является другим приближением к обучающим системам. Градиентный вектор обладает важным свойством указывающий максимальную скорость увеличения функции по мере увеличения аргумента. Процедура настройки весов может быть сформулирована как:
= (3.25)
(3.25)
где J(w) - критерий качества, который минимизируется настройкой . Минимум J(w) может быть достигнут передвижением в направлении отрицательного градиента. Процедура может быть описана следующим образом:
1. Начать с некоторого произвольно выбранного вектора w(1) и вычислить градиентный вектор 
2. Получаем следующую величину w(2) передвигаясь на некоторое расстояние от w(1) в направлении наиболее крутого спуска.
rk в уравнении (3.25) - положительный скалярный множитель, который устанавливает размер шага. Для его оптимального выбора предполагаем, что J(w) может быть аппоксимирован как:
 (3.26)
(3.26)
где 
подставляя (3.25) в (3.26) получим:
 (3.27)
(3.27)
Полагая
 для минимизации
для минимизации  мы получим
мы получим
 (3.28)
(3.28)
или
 , (3.29)
, (3.29)
которое эквивалентно алгоритму Ньютона для оптимального спуска, в котором
rk = D -1.
Некоторые проблемы могут возникнуть с этим оптимальным rk; D -1 в (3.29) может не существовать; используемые матричные операции требуют значительных временных затрат; предположение поверхности второго порядка может быть некорректным. Исходя из этих соображений лучшим выходом будет положить rk равным константе.
3.3.2. Персептронная функция критерия
Пусть функция критерия будет:
 (3.31)
(3.31)
где суммирование осуществляется по неправильно классифицированным векторам образов. Геометрически Jp(w) пропорционально сумме расстояний неправильно классифицированных образов от гиперплоскости.
Возьмем производную от Jp(w) по w(k):
 (3.32)
(3.32)
где w(k) означает величину w на k-ой итерации. Персептронный обучающий алгоритм может быть сформулирован как
w(k+1) = w(k) -  (3.33)
(3.33)
w(k+1) = w(k) +  (3.34)
(3.34)
где Р - последовательность неправильно классифицированных образов при данном w(k). Уравнение (3.34) может быть затем интерпретировано в том смысле, что (k+1) весовой вектор может быть получен добавлением умноженной на некоторый множитель сумму неправильно классифицированных образов для
k-ого весового вектора.
Это процедура, называемая "many-at-time" ("большое время"), т.к. мы определяем wTz для всех zÎР, только после того как все образы были классифицированы.
Если мы делаем настройку после каждого неправильно классифицированного образа (мы называем это "one-at-a-time") процедура функция критерия становится
J(w) = -wTz (3.35)
и
ÑJ(w) = -z
Алгоритм обучения будет иметь вид
w(k+1) = w(k) +rkz (3.37)
Это правило с фиксированным инкрементом, если rk = с (константа).
3.3.3. Релаксационная функция критерия
Функкция критерия, используемая в этом алгоритме, имеет вид
 |
(3.38)
Р - здесь снова последовательность неправильно классифицированных образов при заданном w. То есть Р состоит из тех z, для которых -wTz +b>0
или: wTz < b. Градиент Jr(w) по w(k) дает
 |
(3.39)
Базовый релаксационный обучающий алгоритм формулируется как
 |
(3.40)
 |
Это также "many-at-time" алгоритм. Соответствующий "one-at-a-time" алгоритм будет:
(3.41)
который становится алгоритмом частичной коррекции с l = rk.
3.4. Обучение кусочно-линейных машин
В общем случае не существует теорем сходимости для для обучающих процедур коммитет или других кусочно-линейных машин. Одна процедура, которая часто бывает удовлетворительной приводится ниже. Пусть М=2 и имеется R дискриминантных функций, где R - нечетное. Тогда
 |
(3.42)
Классификация в коммитет-машине будет затем выполняться согласно
 |
(3.43)
 |
так что
(3.44)
 |
где:
(3.45)
Отметим, что так как R - нечетное, d(z) не может быть равно 0 и будет всегда нечетным. Так как d(z) равно разнице между числом di(z) >0 и di(z) < 0 для весового вектора wi (k) для k-ой итерации. В нашем случае мы всегда желаем иметь di(z) >0. Другими словами мы желаем иметь больше весовых векторов, которые дают di(z) >0.
Когда di(z) < 0, имеет место неправильная классификация. Будет очевидным, что в этом случае будет [ R+d(z) ] / 2 весовых векторов среди wi (k), i=1,2,...,R, которые дают отрицательные ответы [di(z) < 0] и [ R-d(z) ] / 2 весовых векторов, которые дают положительные ответы [di(z) >0]. Для получения правильной классификации нам необходимо изменить, по крайней мере n ответов wi (k) от -1 к +1, где n может быть найдено из уравнения:
 (3.46)
(3.46)
В первых скобках представлено число di, которое сейчас больше нуля, выражение в скобках после минуса представляет число di, которое меньше нуля. Минимальная величина n тогда будет
nmin = [d(z) + 1] / 2, (3.47)
которое дает минимальное число векторов, необходимых для настройки.
Процедура для настройки весового вектора:
1) убираем наименьший отрицательный di(z) среди отрицательных di(z);
2) настраиваем [d(z) + 1] / 2 весовых векторов по следующему правилу:
wi (k+1) = wi (k) + сz, (3.48)
таким образом, что из результирующие di(z) становятся положительными. Все другие весовые векторы остаются неизменными на этой стадии;
3) если на k-ой стадии машина неправильно классифицирует образ, принадлежащий w2, делаем классифицирующие коэффициенты с отрицательной величиной, так что
wi (k+1) = wi (k) - сz.
3.5. Практические соображения, касающиеся метода обучения
с коррекцией ошибок.
 |