 2015-01-30
2015-01-30 1350
1350Наиболее удобным методом составления уравнений движения механизмов является метод уравнений Лагранжа второго рода. Сложность уравнения движения будет зависеть от того, какую расчетную схему механической части привода мы выбрали. В большинстве практических случаев выбирают одномассовую, расчетную схему, сводя всю систему электродвигатель-рабочая машина (ЭД-РМ) к жесткому приведенному механическому звену.
Движение одномассовой системы описывается уравнением
 , (2.10)
, (2.10)
где  – электромагнитный момент двигателя;
– электромагнитный момент двигателя;
 – момент сопротивления рабочей машины;
– момент сопротивления рабочей машины;
 – момент инерции, приведённый к валу двигателя
– момент инерции, приведённый к валу двигателя
 .
.
При  , что часто имеет место, уравнение движения имеет вид
, что часто имеет место, уравнение движения имеет вид
 .
.
Структурная схема соответствующая этому уравнению, будет выглядеть так: (рис. 2.3).
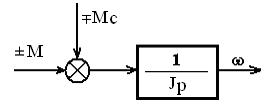
Рис. 2.3. Структурная схема привода
При работе ЭДУ в двигательном режиме М>0, а при работе в генераторном М<0. Если момент Мс является моментом сопротивления, перед ним ставится отрицательный знак, а если движущим – положительный. Для наиболее характерного режима работы ЭП, когда двигатель создает движущий момент, а ИО – тормозящий, уравнение движения выглядит так:
 . (2.11)
. (2.11)
Одномассовая система (жесткое приведённое звено) является интегрирующим звеном. В том случае, когда в кинематической цепи ЭП содержатся нелинейные связи, параметры которых зависят от положения отдельных звеньев механизма (пары кривошип – шатун, кулисный механизм и так далее) движение одномассовой системы описывается нелинейным дифференциальным уравнением с переменными коэффициентами. Входящие в это уравнение моменты в общем случае могут быть функциями нескольких переменных (времени, скорости, угла поворота).
Как следует из структурной схемы, момент двигателя представляет собой управляющее воздействие, а момент сопротивления - возмущающее воздействие.

