 2015-01-07
2015-01-07 2628
2628Асинхронная машина — это бесколлекторная машина переменного тока, у которой в установившемся режиме магнитное поле, участвующее в основном процессе преобразования энергии, и ротор вращаются с разными скоростями.
Основными частями асинхронной машины являются статор — неподвижная часть и ротор — вращающаяся часть.
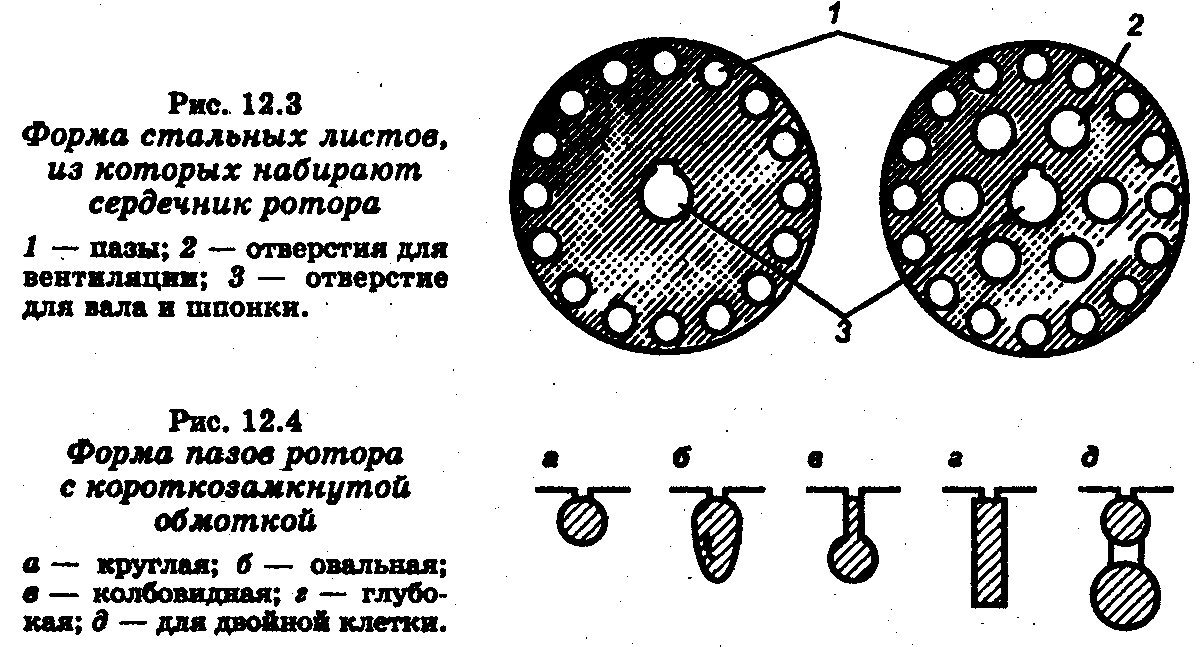
Сердечник статора является неподвижной частью магнитопровода и представляет собой полый цилиндр, набранный из стальных пластин, имеющих вид кольца и изолированных друг от друга. Стальной сердечник магнитопровода статора закрепляют в стальном или алюминиевом корпусе, охватывающем его со всех сторон. К боковым сторонам корпуса крепят подшипниковые щиты. При штамповке стальных пластин на внутренней их стороне делают выступы различной формы. В результате при сборке на внутренней поверхности цилиндра статора получаются пазы, направленные вдоль образующей цилиндра. В пазы закладывают обмотку статора, которая у трехфазного асинхронного двигателя состоит из трех фазных обмоток, смещенных в пространстве друг относительно друга в общем случае на угол 120° /р, где р — количество пар полюсов результирующего магнитного поля. Начала и концы фазных обмоток выводят наружу, они могут быть присоединены к зажимам специального щитка. Выводы обмоток охватывают алюминиевыми хомутиками, на которых обозначены буквы и цифры, принятые для обозначения выводов. На щитке двигателя выводы обмоток располагают так, как показано на рис. 12.2. Это позволяет легко и удобно с помощью коротких плоских пластин соединять обмотки статора звездой (рис. 12.2 а) или треугольником (рис. 12.2 б). На паспортной пластинке, укрепленной на корпусе, указывают два номинальных линейных напряжения, различающихся в  раза. Меньшее значение указанного напряжения является номинальным напряжением, на которое рассчитаны фазные обмотки статора. Способ соединения обмоток зависит от линейного напряжения в трехфазной сети. Если линейное напряжение источника питания равно наибольшему напряжению, указанному в паспорте машины, то обмотку его статора соединяют звездой, в противном случае — треугольником. В некоторых случаях обмотки соединены внутри двигателя и снаружи имеется только три вывода. В этом случае на щитке указано линейное напряжение. Ротор асинхронного двигателя также набирают из стальных штампованных листов (рис. 12.3). Насаженные на вал, они образуют ротор, имеющий форму цилиндра. По наружному периметру листа штампуют отверстия, образующие пазы ротора, в которые закладывают обмотку. Форма пазов может быть различной (рис. 12.4). Двигатели большой мощности имеют ротор с вентиляционными отверстиями для охлаждения.
раза. Меньшее значение указанного напряжения является номинальным напряжением, на которое рассчитаны фазные обмотки статора. Способ соединения обмоток зависит от линейного напряжения в трехфазной сети. Если линейное напряжение источника питания равно наибольшему напряжению, указанному в паспорте машины, то обмотку его статора соединяют звездой, в противном случае — треугольником. В некоторых случаях обмотки соединены внутри двигателя и снаружи имеется только три вывода. В этом случае на щитке указано линейное напряжение. Ротор асинхронного двигателя также набирают из стальных штампованных листов (рис. 12.3). Насаженные на вал, они образуют ротор, имеющий форму цилиндра. По наружному периметру листа штампуют отверстия, образующие пазы ротора, в которые закладывают обмотку. Форма пазов может быть различной (рис. 12.4). Двигатели большой мощности имеют ротор с вентиляционными отверстиями для охлаждения.
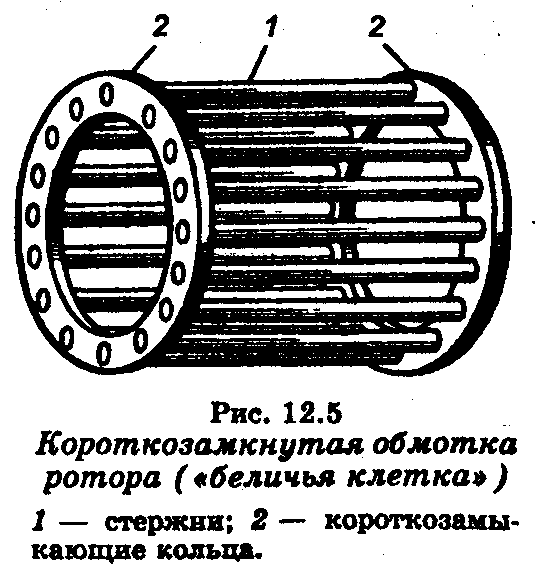 По конструктивному исполнению обмотки ротора асинхронные двигатели подразделяют на двигатели с короткозамкнутым ротором и двигатели с фазным ротором. Короткозамкнутая обмотка образуется медными или латунными неизолированными стержнями, помещаемыми в пазы ротора. Поперечное сечение этих стержней имеет форму паза. По торцам стержни соединяют медными короткозамыкающими кольцами. Получается обмотка, не имеющая никаких выводов (рис. 12.5). Такие обмотки могут быть одноклеточными и двухклеточными (форма паза на рис. 12.4д). Число фаз такой обмотки равно числу пазов, в которых она размещена.
По конструктивному исполнению обмотки ротора асинхронные двигатели подразделяют на двигатели с короткозамкнутым ротором и двигатели с фазным ротором. Короткозамкнутая обмотка образуется медными или латунными неизолированными стержнями, помещаемыми в пазы ротора. Поперечное сечение этих стержней имеет форму паза. По торцам стержни соединяют медными короткозамыкающими кольцами. Получается обмотка, не имеющая никаких выводов (рис. 12.5). Такие обмотки могут быть одноклеточными и двухклеточными (форма паза на рис. 12.4д). Число фаз такой обмотки равно числу пазов, в которых она размещена.
У машин малой мощности (до 100 кВт) пазы ротора заливают расплавленным алюминием. При этом сразу отливают стержни обмотки, короткозамыкающие кольца и вентиляционные лопатки (рис. 12.6).
Обмотку фазного ротора выполняют из изолированных проводников аналогично обмотке статора. Фазные обмотки ротора соединяют звездой, при этом их начала соединяют с контактными кольцами, расположенными на валу и изолированными как от вала, так и друг от друга. Контактные кольца вращаются вместе с валом. По ним скользят неподвижные щетки, к которым подсоединены реостаты, соединенные звездой (рис. 12.7).
Билет 2. 1. Периодические величины изменяются во времени по значению и направлению, причем эти изменения повторяются через некоторые равные промежутки времени Т, называемые периодом.
Любая периодическая величина имеет ряд характерных значений. Максимальные значения, или амплитуды, ЭДС, напряжения и тока обозначают соответственно Um, Em и Im. Значения периодически изменяющейся величины в рассматриваемый момент времени называют мгновенным и обозначают e, u, i. Максимальное значение – частный случай мгновенного. Величину, обратную периоду и равную числу полных изменений периодической величины за 1 с, называют частотой: f=1/T.
Действующим значением син. тока называют такое значение постоянного тока, при котором в одном и том резисторе с сопротивлением R за время одного периода T выделяется столько же теплоты, сколько и при син. токе. Или же это среднеквадратичное значение величины за период: I=Im/  .
.
2. Уравнение электрического и магнитного состояния идеального тр-ра: Em1=2πW1fФm=2πW1fSBm;
Em2=2πW2fФm=2πW2fSBm; где S – сечение магнитопровода; Bm – максимальное значение магнитной индукции в магнитопроводе.
U1= -E1’+I1’r1+jx1I1’; E2= U2 – I2’r2’ – jx2’I2’; I0=I0а+I0р; I0=I1+(-I2’); F0=F1+F2; I0W1=I1W1+I2W2; I2’=I2*(W2/W1).
Обычно число витков ω1первичной обмотки трансформатора не равно числу витков ω2вторичной обмотки. Это приводит к ряду затруднений при изучении режимов работы трансформаторов и при расчете электрических цепей, элементами которых они являются. Во-первых, трансформаторы соединяют различные участки цепи электромагнитным путем, электрически же эти участки остаются несвязанными. При ω2≠ ω1 ЭДС Е 1и Е2 первичной и вторичной обмоток также не равны. Если в электрической цепи последовательно включены п трансформаторов, то при ее расчете приходится п раз изменять по значению ток и напряжение. Во-вторых, при передаче электроэнергии происходит потеря напряжения в первичной и вторичной обмотках трансформатора. Так как номинальные напряжения и токи обмоток отличаются друг от друга в десятки раз и их активные и индуктивные сопротивления различны, то потери напряжения в обмотках также различаются в десятки раз. Поэтому суммирование потерь напряясения в обмотках (в вольтах) не имеет никакого физического смысла, хотя понятно, что на значение вторичного напряжения влияют как потери напряжения во вторичной обмотке, так и потери напряжения в первичной обмотке трансформатора. Чтобы преодолеть эти затруднения, обе обмотки трансформатора приводят к одному числу витков (обычно вторичную к первичной). Таким образом получают приведенную вторичную обмотку, имеющую ω1 витков. Так как число витков обеих обмоток становится одинаковым, то ЭДС обмоток будут равны и совпадают по фазе. При приведении необходимо выполнить условие, чтобы энергетические параметры (мощность, потери мощности) приводимой обмотки не изменились и не повлияли на энергетические соотношения в трансформаторе. ЭДС, напряжение, ток и сопротивления приведенной обмотки обозначают теми же буквами, только со штрихом сверху:
E2‘, U2’, I2’, R2’, X2’, Z2’.
 3. Принцип работы АД.
3. Принцип работы АД.
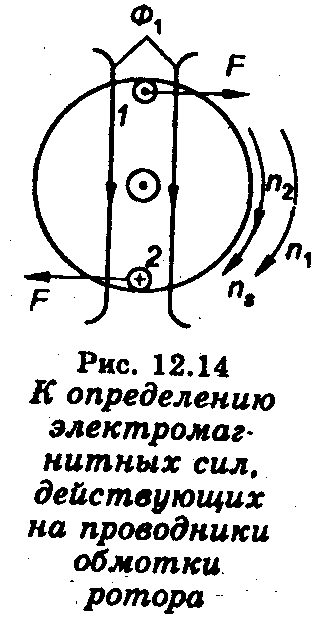
Созданное обмоткой статора вращающееся с частотой п 1магнитное поле (магнитный поток Ф1) пересекает проводники обмотки ротора и индуцирует в них ЭДС (рис, 12.14). Рассмотрим два проводника (1 и 2) обмотки ротора, расположенные диаметрально противоположно на осевой линии магнитного потока. Согласно правилу правой руки ЭДС в проводнике 1 направлена «на читателя», а в проводнике 2 — «от читателя». Проводники обмотки ротора (как короткозамкнутого, так и фазного) образуют замкнутую цепь, и под действием ЭДС в них возникает ток ротора, направление активной составляющей которого совпадает с направлением ЭДС. На проводники ротора с током, расположенные в магнитном поле, действуют силы F, пропорциональные магнитной индукции в месте расположения проводников, активной составляющей тока в них и длине проводников. Направление силы (см. рис. 12.14) определяют по правилу левой руки. Такие же силы действуют на все проводники обмотки ротора, при этом возникает вращающий момент на валу. Если вращающий момент превысит значение тормозного момента на валу, ротор начнет вращаться, и его частота вращения будет возрастать до тех пор, пока не наступит равновесие моментов при некотором значении частоты вращения n2=const.
Направление вращения ротора совпадает с направлением вращения магнитного поля статора. Но частота вращения n2в режиме двигателя меньше n1. Если представить, что n2=n1,то проводники ротора не будут пересекаться вращающимся магнитным потоком, в них не будет индуцироваться ЭДС, в них не будет тока, а следовательно, сила F, действующая на проводники обмотки ротора, будет равна нулю. В таких условиях ротор сможет вращаться только по инерции. Но так как в реальном двигателе всегда имеются силы трения в подшипниках и трения вращающегося ротора о воздух, то ротор начнет тормозиться, т. е. получим
n2 < n1. Таким образом, чтобы возникали сила Р и вращающий момент, действующий на ротор, частота его вращения должна быть n2 < n1.
Скольжением называют относительную разность частот вращения магнитного поля и ротора. Скольжение обозначают буквой Sи выражают в относительных единицах или в процентах:
 или
или 
Частота вращения ротора асинхронного двигателя зависит как от скольжения, так и от частоты вращения магнитного поля. Ее можно определить следующим образом: 
В режиме двигателя скольжение Sизменяется от 0 до 1. При пуске двигателя п2 = 0 и S= 1.
Чем больше тормозной момент, создаваемый на валу двигателя, тем меньше частота вращения ротора n2 и больше скольжение S.Именно потому, что частота вращения ротора не равна синхронной частоте и изменяется с изменением нагрузки, двигатель называют асинхронным.
 Билет 3. 1. Под средним значением син. величины понимают ее среднеарифметическое значение. Если определять среднеарифметическое значение за период, оно будет =0, т.к. положительная и отрицательная полуволны син. кривых совпадают по форме. Поэтому среднее значение син. тока опр-ют за полпериода. Т.о. за среднее значение син. тока принимают такое значение постоянного тока, при котором за полпериода переносится такой же электрический заряд, что и при син. токе.
Билет 3. 1. Под средним значением син. величины понимают ее среднеарифметическое значение. Если определять среднеарифметическое значение за период, оно будет =0, т.к. положительная и отрицательная полуволны син. кривых совпадают по форме. Поэтому среднее значение син. тока опр-ют за полпериода. Т.о. за среднее значение син. тока принимают такое значение постоянного тока, при котором за полпериода переносится такой же электрический заряд, что и при син. токе.
Iср=(2/π)Im.
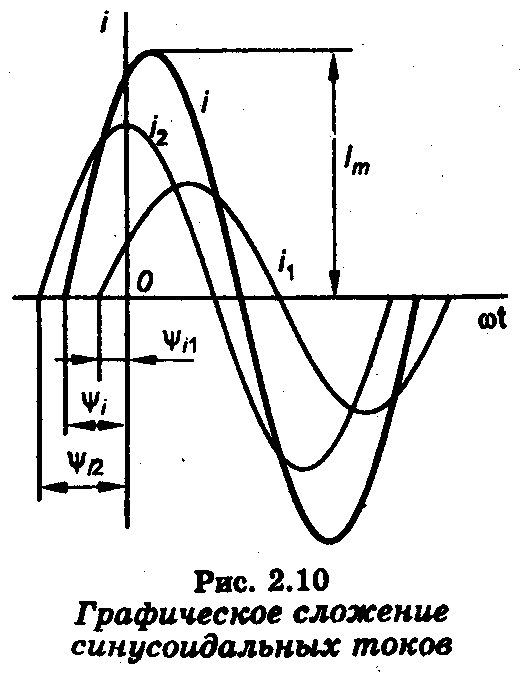
При сложении син. величин надо сложить ординаты для ряда значений угла ωt и по точкам построить синусоиду суммарной величины. На рис 2.10 показано сложение двух токой i1 и i2. Суммарный ток
I=Imsin(ωt+ψi), причем Im≠I1m+I2m, а ψi≠ψi2-ψi1.








