 2014-04-09
2014-04-09 3308
3308А) Состав и срок полномочий Конституционного Совета РК
Б) Функции
Теория механизмов и машин и детали машин. ВВЕДЕНИЕ
Дисциплина «Теория механизмов и машин и детали машин» является одной из основных общеинженерных дисциплин, которую изучают в вузах курсанты инженерно-технических специальностей.
Опорный конспект лекций дисциплины составлен с целью предоставления помощи преподавателям при подготовке к лекционным занятиям и самостоятельного изучения дисциплины курсантами при подготовке к текущему, модульному контролю знаний и экзаменам. Согласно рабочей программе конспект лекций включает в себя два раздела.
В первом разделе − «Теория механизмов и машин» рассматривается общая теория образования механизмов как совокупности связанных между собой тел, которые обладают различными формами движения, изучаются кинематические и динамические характеристики механизмов в зависимости от их геометрических параметров и действующих на механизмы сил.
В курсе теории механизмов и машин широко используется современный математический аппарат, и изучаются как аналитические, так и графические приемы решения задач анализа и синтеза механизмов.
|
|
|
Второй раздел «Детали машин» охватывает ряд общих положений конструирования деталей и узлов общемашиностроительного назначения. В нем рассмотрены основные принципы конструирования деталей машин и их расчеты на прочность, жесткость, выносливость, долговечность и т.п., чтобы гарантировать надежность их работы в реальных условиях эксплуатации.
В этом разделе раскрывается также основы классификации и выбора механических передач, критерии работоспособности и основы расчета фрикционных, ременных, цепных, зубчатых и червячных передач, а также расчета валов, подшипников, муфт и соединений деталей машин.
Раздел 1. Теория механизмов и машин
Лекция № 1. Структура механизмов
План
1. Краткий исторический обзор развития «Теории механизмов и машин».
2. Основные понятия и определения.
3. Классификация кинематических пар. Степень свободы.
4. Структурный анализ механизмов.
Краткий исторический обзор развития ТММ
Простейшие механизмы (рычажные, зубчатые и др.) были известны с давних времен. Постепенно шел процесс их исследования, совершенствования и внедрения в практику с целью облегчения труда человека и повышения производительности труда.
Так в 15 веке Леонардо да Винчи разработал проекты конструкции механизмов ткацких станков, печатных и деревообрабатывающих машин.
Математик и механик А. Эйлер (1707-1783), автор 850 научных трудов, исследовал колебания и устойчивость упругих тел, а также профили зубьев зубчатых колес, и пришел к выводу о том, что наиболее перспективным является эвольвентный профиль.
|
|
|
Русский механик и изобретатель И. И. Ползунов (1720-1766) впервые разработал проект механизма двухцилиндрового парового двигателя, сконструировал автоматический регулятор питания котла водой и т.д.
Механик И. И. Кулибин (1735-1818) создал знаменитые часы в форме яйца, представляющего собой сложнейший по тем временам механизм автоматического действия.
Как наука «Теория механизмов и машин» (ТММ) под названием «Прикладная механика» начала формироваться в начале XIX века.
Знаменитый русский ученый П. Л. Чебышев (1821-1894) опубликовал 15 работ по структуре и синтезу рычажных механизмов, изобрел свыше 40 различных новых механизмов. Структурная формула плоских механизмов называется сейчас формулой Чебышева.
Значительный вклад в динамику машин внес отец русской авиации Н. Е. Жуковский (1847-1921). Он был не только основоположником современной аэродинамики, но и автором целого ряда работ по прикладной механике и теории регулирования хода машин.
Русский ученый Ассур (1878-1920) открыл общую закономерность в структуре плоских многозвенных механизмов. Он же разработал метод особых точек для кинематического анализа сложных рычажных механизмов.
Существенный вклад в становление механики внес И. И. Артоболевский (1905-1977). Он является организатором школы теории механизмов и машин. Им написаны многочисленные труды по структуре, кинематике и синтезу механизмов, динамике машин и теории машин-автоматов, а также учебники, получившие всеобщее признание.
В 30-е года и последующие годы большой вклад в теорию механизмов и машин внесли своими исследованиями М. Т. Бруевич − один из создателей теории точности механизмов, Г. Г. Баранов (1899-1968) − автор трудов по кинематике пространственных механизмов, С. Н. Кожевников, разработавший общее методы динамического анализа механизмов с упругими звеньями и механизмов тяжело нагруженных машин.
2. Основные понятия и определения
Теория механизмов и машин − это наука, изучающая строение кинематику и динамику механизмов методом их анализа и синтеза.
Анализ − это исследование структурных, кинематических и динамических свойств механизмов.
Синтез − это проектирование механизмов с заданными структурными кинематическими и динамическими свойствами.
Всякий механизм состоит из деталей. Подвижные детали называются звеньями, неподвижные – стойками.
Таким образом, в любом механизме имеются одно неподвижное звено и одно или несколько подвижных звеньев.
Подвижное соединение двух соприкасающихся звеньев называется кинематической парой.
Совокупность поверхностей, линей и точек звена, входящих в соприкосновение с другим звеном пары, называют элементом пары.
Система звеньев, связанных между собой кинематическими парами, называется кинематической цепью.
Кинематическая цепь взаимосвязанных подвижных звеньев, в состав которой входит неподвижное звено (стойка), предназначенная для преобразования заданных движений одного или нескольких звеньев в требуемое движение других звеньев называется механизмом.
На относительное движение каждого звена кинематической пары могут накладываться ограничения, зависимые от способа соединения звеньев пары. Эти ограничения называют условиями связи или связями.
Свободно движущееся в пространстве твердое тело имеет 6 степеней (Н) свободы (рисунок 1.1). Число связей (S), которое можно наложить на относительное движение каждого звена кинематической пары может быть не более 5, иначе звенья станут неподвижными, т.е.
1≤ S≤ 5, (1.1)

Рисунок 1.1 - Степени свободы тел в пространстве
Следовательно, число степеней свободы (Н) звена кинематической пары может быть равно H=6-S, т.е. 1 ≤ Н ≤ 5, (1.2)
|
|
|
Классификация кинематических пар и цепей
Кинематические пары могут быть:
поступательными и вращательными,
низшими и высшими,
одноподвижными и многоподвижными (I….V класса).
Поступательными называется пары, допускающие только поступательное движение звеньев, вращательными – пары, допускающие только вращательное движение вокруг некоторой оси.
К низшим парам относятся пары, у которых звенья касаются между собой по всей поверхности. К ним относятся поступательные и вращательные кинематические пары.
К высшим относятся пары, звенья которых соприкасаются друг другом в точке или по линии. К ним относятся фрикционные, кулачковые зубчатые, храповые и мальтийские пары.
В зависимости от числа условий связи, все кинематические пары делятся на классы. Они могут быть:
- пятиподвижными (сферич.), S=1, I класс,
- четырехподвижными (цилиндр), S=2, II класс,
- трехподвижными (сферич.), S=3, III класс,
- двухподвижными (цилиндр), S=4, IV класс,
- одноподвижная (поступат. и вращат.), S=5, V класс.
При нулевой степени свободы кинематической цепи ни одно из звеньев не может двигаться относительно неподвижного звена (стойки) и кинематическая цепь превращается в ферму.
Кинематические цепи могут быть простыми и сложными.
У простой кинематической цепи каждое звено входит не более чем в две кинематические пары, у сложной пары каждое звено входит более чем в 2 кинематические пары (рисунок 1.2).
 Простая КП Сложные КП
Простая КП Сложные КП
Рисунок 1.2 − Виды кинематических цепей
Простые и сложные кинематические цепи, в свою очередь, делятся на незамкнутые и замкнутые (рисунок 1.3).
Рисунок 1.3 − Кинематические цепи
а − простая (незамкнутая); б – сложная незамкнутая; в – простая замкнутая;
1, 2,….6 – звенья; А, В, ….., L − кинематические пары.
Число степеней свободы кинематической пары относительно неподвижного звена называется подвижностью кинематической цепи(механизма).
Подвижность пространственной цепи (механизма) определяется по формуле Сомова-Малышева
|
|
|
W=6n-5p5-4p4-3p3-2p2-p1, (1.3) где n-число подвижных звеньев,
p1…p5 – число пар I…V классов.
Подвижность плоского механизма уменьшается на 3 и рассчитывается по формуле Чебышева
W=3n - 2p5 - p4 (1.4)
При изучении структуры и кинематики плоских механизмов во многих случаях удобно заменять высшие пары механизмов низшими. При этом подвижность механизма не должна изменяться. Полученный механизм называется заменяющим (рисунок 1.4)
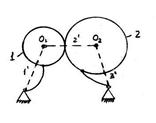
Рисунок 1.4 − Схема механизма с высшей парой
Представляемый подвижными звеньями 1,2 фрикционный механизм состоит из высшей кинематической пары 1,2 IV класса и двух низших пар 01 и 02 V класса и стойки, т.е. n=2, P5=2, P4=1. Подвижность такого механизма составляет
W=3n - 2p - p4=3 ·2 –2 ·2 -1=1, (1.5)
Заменяющий механизм представлен подвижными звеньями 1´2´3´ и стойками 0. Кинематические пары 01´; 1´,2´ 2´3´, 3´0 является вращательными парами пятого класса. Имеем n=3, p5=4, и p4=0
Тогда подвижность заменяющего механизма будет равна
W=3n - 2p5 - p4=3 ·3 –2 ·4 - 0=1, (1.6)
Таким образом, после замены высшей пары низшей подвижность механизма не изменилась, следовательно, замена выполнена правильно.








