 2015-02-27
2015-02-27 3775
37751.1. Электрификация технологических процессов сельскохозяйственного производства, ее роль в научно-техническом прогрессе по совершенствованию и развитию АПК
Научно-технический процесс позволил механизировать и автоматизировать многие технологические процессы сельскохозяйственного производства, создать условия для высокопроизводительной и нетруднозатратной работы людей.
Для снабжения села электрической энергией в РБ построено 220 тысяч километров линий электропередач напряжением 0,4…10 кВт, установлено 69000 трансформаторных подстанций общей мощностью 14 тысяч МВА. Сельское хозяйство на производственные нужды ежегодно потребляет 1800 млн. кВт.ч электрической энергии. Электровооруженность труда на одного среднесписочного работника составляет 3680 кВт.ч в год. Сегодня на селе насчитывается 1,3 млн. электродвигателей, 8,1 млн. светильников, 12,7 тысяч тепловых котлов, 21,2 тысяч электрофицированых водозаборных скважин, десятки тысяч электронагревательных установок, а так же электронасыщенная инфраструктура.
Современный этап экономического развития всех отраслей народного хозяйства страны характеризуется планомерным переходом к трудо-, ресурсо- и энергосберегающим формам и возрастанием роли социальных факторов. Особенную роль в этих условиях приобретают проблемы интенсификации сельского хозяйства и связанных с ним отраслей агропромышленного комплекса. В комплексе научно-технических и социально-экономических проблем, связанных с сельскохозяйственным производством важное место занимает электрификация технологических процессов сельского хозяйства.
Под электрификацией сельского хозяйства понимаются целенаправленные применения электрической энергии в технологических процессах с технически возможной и экономически выгодной точек зрения. Современная электрификация стала сложным производственно-техническим процессом, в котором использование электроэнергии тесно переплетено с технологией и организацией производства в целом. Комплексная механизация, электрификация и автоматизация является генеральным направлением развития современного сельского хозяйства. Существенное значение использования электроэнергии для сельского хозяйства состоит во внедрении систем электрофицированых машин в сельскохозяйственное производство, позволяющая завершить комплексную механизацию и автоматизацию трудоемких процессов в животноводстве, птицеводстве, растениеводстве, повысить производительность труда, сократить численность работников, улучшить качество продукции и снизить затраты на ее производство, облегчить труд рабочего.
Различные виды и способы применения электроэнергии в сельском хозяйстве классифицируются по энергетическому и отраслевому принципу.
Энергетический принцип отражает преобразования электрической энергии в другие виды энергии, а также ее непосредственное использование в технологических процессах. По этому принципу различают способы применения электроэнергии:
– преобразование электрической энергии в механическую (электроприводов механизмов и машин);
– преобразование электрической энергии в тепловую (электрический нагрев);
– преобразование энергии в энергию электромагнитных излучений (электрическое освещение и облучение);
– непосредственное использование электрической энергии в технологических процессах (электротехнология).
Отраслевой принцип классифицирует установки, используемы в животноводстве, растениеводстве, подсобных предприятиях и быту сельского населения.
В животноводстве с помощью электроэнергии осуществляют электропривод различных установок, приготовление и раздачу корма, поение животных, дойку коров, первичную обработку молока, уборку навоза, помета, оптимальный микроклимат, освещение и облучение животных, стрижку овец, вывод и обогрев молодняка птиц, сбор яиц и другое.
В растениеводстве электроэнергию используют при очистке, сушке, сортировке зерна, при приготовлении травяной муки и гранул, при переработке и хранении сельскохозяйственной продукции, при орошении. В теплицах электричество обогревает почву и воздух, регулирует температуру, влажность, газовый состав, обеспечивает фотосинтез растений, приводит в действие различные механизмы. Весьма перспективным и многообещающим направлением научно технического процесса является непосредственное использование электроэнергии в технологических процессах обработки почвы и зерна.
Огромны возможности электрификации подсобных предприятиях в хозяйствах и быту. Здесь нашли распространение электропривод, -освещение, -сварка, -тепло, переработка и хранение сельскохозяйственной продукции.
Переход к комплексной механизации и электрификации сельскохозяйственного производства, курс на индустриальные методы производства выдвинул новые научно-технические задачи в области электрооборудования сельскохозяйственных машин, агрегатов и поточных линий:
– сельскохозяйственному производству требуется автоматизиро-ванные технологические линии, оснащенные средствами контроля и управления для организации слаженной работы отдельных машин и участков технологического процесса;
– внедрение регулируемого автоматизированного электропривода поточных технологических линий (вентиляционные установки типа «Климат», автоматизированные водоснабжающие установки, управление ЗАВ и КЗС, кормоцехами, системами приготовления и раздачи кормов);
– разработка и организация производства унифицированных комплектных электроприводов для основных технологических линий сельскохозяйственного производства;
– повышения требования к качеству электроэнергии и надежности электрооборудования;
– большое значение приобретает технико-экономический аспект, как при приемлемых затратах на автоматизацию получить наибольший производственный экономический эффект.
В настоящее время имеет место частичная реализация этих задач в технологических процессах сельскохозяйственного производства.
1.2. Особенности работы электрооборудования в условиях сельскохозяйственного производства
Работа электрооборудования в условиях сельскохозяйственного производства имеет следующие особенности:
– самые разнообразные условия работы электрооборудования по климатическим (температура, влажность, газовый состав и загрязненность воздуха), биологическим (плесневые грибы, бактерии, насекомые, грызуны) и механическим (вибрация) фактором внешней среды;
– работа электрооборудования связана со слабо изученной биотехнической системой, в которой основные процессы протекают в биологическом объекте, характеризующего непрерывностью физиологических процессов и цикличностью получения продукции;
– размещение электрооборудования на значительных площадях и часто объекты имеют контролируемые и регулируемые параметры, распределенные по технологическому объему и во времени самым случайным образом;
– большая протяженность сельских линий электропередач и работа электрооборудования от источников питания ограниченной мощности (от отдельных комплектных трансформаторных подстанций);
– огромное разнообразие технологических процессов и часто удаленность от ремонтной базы, сезонность их работы и широкий диапазон изменения параметров;
– сложность и жесткость требований по управлению электрическими установками отдельных специфических технологических процессов;
– разработка индивидуальных электроустановок и создание автоматизированных поточных электроприводов наиболее совершенного вида;
– предъявление высоких требований к надежности электрооборудования и качеству электроэнергии (отклонение и несимметрия напряжения от основной частоты).
1.3.Понятия, определения, терминология и классификация электроприводов, используемых в сельском хозяйстве
На современном уровне развития техники электропривод определяется как автоматизированный электропривод (ЭП) и им называется электромеханическая система, предназначенная для приведения в движение исполнительных органов рабочей машины (ИОРМ) и управления этим движением (рис.1.1).
Электрическая энергия (ЭЭ) от источника электроэнергии 1 через преобразовательное устройство 2 (источник получения требуемых для электродвигателя параметров энергии и управления ее потоком) подается на электрический двигатель 3 (электромеханический преобразователь энергии). От электродвигателя механическая энергия (МЭ) через передаточное устройство 4 (механическое, гидравлическое, электромагнитное) и имеющее функцию согласования движения электродвигателя и исполнительного органа передается на ИОРМ. Управление преобразователем 2 осуществляется от управляющего устройства 5 с помощью сигнала U зад., задающего характер движения исполнительного органа, и ряда дополнительных сигналов U доп., дающих информацию о реализации технологического процесса рабочей машины и характере движения ИОРМ, работе отдельных узлов ЭП, возникновения аварийных ситуаций.
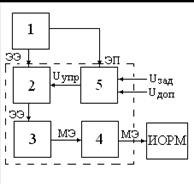
Рис. 1.1. Структурная схема электропривода в своем наиболее развитом виде
Электротехнические изделия сельскохозяйственного назначения рассчитаны, как правило, для работы в трехфазной системе переменного тока с глухозаземленной нейтралью (нулевым проводом) напряжением 220/380 В частотой 50 Гц.
В электрическом приводе наиболее характерным является использование следующих типов:
– электродвигателей – постоянного тока различного возбуждения, асинхронных, синхронных, вентильных, шаговых, линейных постоянного и переменного токов;
– передаточных устройств – механических (цилиндрических, червячных и планетарных редукторов, передач винт-гайка, цепная и ременная), гидравлических, электромагнитных муфт;
– силовых преобразователей – управляемых выпрямителей, инверторов тока и напряжения, регуляторов частоты и напряжения, система Г-Д и импульсных регуляторов напряжения;
– блоков управления – кнопок управления, командоаппаратов, реле, логических элементов, микроконтроллеров, регуляторов, усилителей, микропроцессоров и управляющих электронных машин.
Уместно здесь вспомнить, что первый электрический привод был создан русским ученым академиком Б.С. Якоби в 1839 г. для приведения в движение катера (бота) на р. Неве со скоростью 2,5 км/ч и перевозившего против течения 12…14 человек. Привод имел сорок электродвигателей постоянного тока, работавших на два параллельных вала и гальваническую батарею из 320 элементов. Несовершенство самого двигателя, неэкономичность гальванической батареи, отсутствие качественных средств, в основном проводов, для передачи энергии, не позволили в то время использовать широко электрический привод для промышленных целей.
Существенное значение электропривода для народного хозяйства состоит в широком внедрение рационального электропривода, который коренным образом изменяет условия производственной работы, повышая количество и улучшая качество продукции, повышая производительность и облегчая труд рабочего. В течение рабочего дня один человек может при помощи мускульной энергии выработать 1 кВт. ч. При средней установленной мощности электродвигателей 4…5 кВт и при семичасовом рабочем дне это дает потребление 28…35 кВт. ч, соответственно заменяя 28…35 человек.
Классификацию электропривода выполним по следующим признакам (ГОСТ 16593-79 «Термины и определения»), выделяя только наиболее важные ее рубрикации:
– расположению – стационарный, передвижной;
– назначению – главный, вспомогательный;
– характеру движения электродвигательного устройства (ЭУ) – вращательный, линейный;
– направлению вращения ЭУ – реверсивный, нереверсивный;
– принципу действия ЭУ – непрерывного, дискретного;
– виду связей ЭУ с ИОРМ – непосредственная, наличие той или иной передачи (механическая, гидравлическая, электромагнитная), маховиковая;
– соотношению чисел ЭУ и ИОРМ – групповой (обеспечивает движение ИО нескольких рабочих машин или несколько ИО одной рабочей машины) индивидуальной, взаимосвязанной (два или более электрически или механически электродвигатели связаны между собой);
– рода тока – постоянного, переменного;
– источникам питания – сетевой, автономный (аккумуляторный, теплоэлектрический, система Г-Д);
– характеру изменения параметров – нерегулируемый, регулируемый (неавтоматизированный, автоматизированный);
– системам регулируемый электропривод выполняется: управляемый выпрямитель – двигатель (УВ-Д), преобразователь частоты – двигатель (ПЧ-Д), генератор-двигатель (Г-Д), магнитный усилитель-двигатель (МУ-Д), каскадный, импульсный, резисторный.
Наиболее совершенным видом регулируемого электропривода в настоящее время является автоматизированный электропривод поточных линий.
1.4. Достоинства, отличительные черты и пути дальнейшего развития электропривода
Электрический привод обладает рядом достоинств и отличительных черт:
– возможностью изготовления электродвигателей на самые разнообразные мощности и скорости вращения. Диапазон мощностей современного электропривода колеблется от сотых долей ватта до десятков тысяч киловатт (50 МВт), а пределы скорости вращения – от долей оборотов в минуту, а то и менее, до несколько сотен тысяч оборотов в минуту (достигнуто 200000 об/мин);
– возможностью создания электроприводов для работы в самых разнообразных условиях – среда агрессивных жидкостей и газов, условия космического пространства, низкие и высокие температуры и так далее;
– разнообразия конструктивных исполнений электродвигателей позволяет рационально осуществлять сочленение электродвигателя с рабочей машиной;
– возможностью даже с помощью простых средств управления реализовать разнообразные и сложные виды движения ИОРМ при изменении направления движения и его параметров – момента, скорости, ускорения;
– возможностью автоматизации производственных и технологических процессов, простой включения электропривода в общую автоматизированную систему управления производства;
– высоким КПД электропривода, надежностью в эксплуатации, благоприятными условиями для обслуживающего персонала, отсутствием загрязнений окружающей среды.
К основным направлениям развития, современного электропривода относятся:
– с ростом производительности машин и увеличения их энергонасыщенности – увеличение установленной мощности электродвигателей до 220…250 кВт;
– разработка и выпуск комплектных регулируемых электроприводов с использованием современных преобразователей блочно-модульного типа и микропроцессорного управления;
– повышение эксплуатационной надежности, унификации и улучшения энергетических показателей электроприводов;
– расширение области применения регулируемого асинхронного электропривода и использования электропривода с новыми типами двигателей – линейными, шаговыми, вентильными, вибрационными, повышенного быстродействия и так далее
– развитие научно-исследовательских работ по созданию математических моделей и алгоритмов технологических процессов, машинных средств проектирования электропривода и подготовка инженерно-технических и научных кадров.
Следует отметить и то важное обстоятельство, что разработка и серийный выпуск различных средств вычислительной техники, микроэлектроники, полупроводниковых преобразователей, электрических машин, аппаратов и других элементов автоматизированного электропривода способствует его бурному развитию, совершенствованию и превращению в основное средство автоматизации и комплексной механизацию не только сельского хозяйства, но и всех отраслей народного хозяйства.
2. Механические характеристики производственных механизмов и электрических двигателей
2.1. Виды и классификация механических характеристик производственных механизмов и электрических двигателей
Производственный механизм, выполняя положенные ему функции в технологическом процессе, предъявляет определенные требования к электродвигателю и которым он должен удовлетворять. Поэтому необходимо хорошо знать механические свойства производственных механизмов, электрических двигателей и зависимость их от ряда параметров, в первую очередь от скорости вращения. Характер изменения момента сопротивления производственного механизма и вращающего момента двигателя в зависимости от скорости вращения играет большую роль в переходных процессах: пуск, остановка, торможение, регулирование скорости вращения, реверсирование, работа электропривода с резко переменной нагрузкой на валу электродвигателя. Он позволяет определять другие параметры электропривода: мощность, момент, время переходных режимов.
Механической характеристикой производственного механизма называется зависимость между развиваемым им моментом сопротивления и скоростью вращения приводного вала, М с = f (ω). Различные производственные механизмы имеют разнообразные механические характеристики (рис. 2.1), однако обобщающее аналитическое выражение для них имеет вид
 , (2.1)
, (2.1)
где М с – момент сопротивления производственного механизма при скорости вращения ω;
М о – момент сопротивления производственного механизма, отнесенный к ω = 0, чаще всего момент сопротивления движущихся частей при трении или холостом ходе;
М с.н – момент сопротивления производственного механизма при номинальной скорости вращения w н.мех;
α – показатель степени, характеризующий изменение момента сопротивления при изменении скорости вращения.
Характеристика 1 соответствует α = 0, не зависящая от скорости механическая характеристика – крановый нагрузочный момент. Такой характеристикой обладают подъемные краны, лебедки, конвейеры и ленточные транспортеры, с постоянной загрузкой, поршневые насосы с неизменной высотой подачи, механизмы подачи металлорежущих станков, бумагоделательные машины.
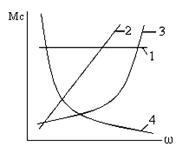
Рис. 2.1. Типичные механические характеристики производственных механизмов
Характеристика 2 соответствует α =1, пропорциональная зависимость, линейно-возрастающая механическая характеристика – фрикционный нагрузочный момент. Такой характеристикой обладают механизмы, имеющие большое количество мест трения: конвейеры с фрикционной нагрузкой, поршневые компрессоры, зерноочистительные машины, зерновые молотилки под нагрузкой.
Характеристика 3 соответствует α =2, параболическая, квадратичная зависимость, нелинейно-возрастающая механическая характеристика – вентиляционный нагрузочный момент. Такой характеристикой обладают механизмы, работа которых сводится к преодолению сопротивления жидкости или газа при вращательном движении: вентиляторы, центробежные насосы, центрифуги, сепараторы, трубовоздуходувки, судовые винты, молотильные барабаны при работе вхолостую.
Характеристика 4 соответствует α= -1, гиперболическая зависимость, нелинейно-спадающая механическая характеристика – вязкий нагрузочный момент. Такой характеристикой обладают колосовой элеватор, зерновые нории, глиномялка, бетономешалка, тестомешалка, различные наматывающие устройства, некоторые металлорежущие станки.
Рассмотренные механические характеристики имеют в основном рабочие участки и представляют некоторую идеализацию действительных условий. Реальные механические характеристики производственных механизмов более сложны по виду и обычно сочетают рассмотренные зависимости.
Механические характеристики электродвигателей рассматривают важные их свойства с точки зрения работы электропривода.
Механической характеристикой электродвигателей называется зависимость развиваемого им момента от скорости вращения, М дв= ψ (ω). Типичные механические характеристики различных электродвигателей показаны на рис. 2.2.
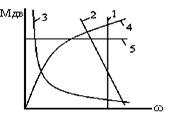
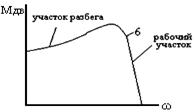
Рис. 2.2. Типичные механические характеристики различных электродвигателей: 1 – синхронного переменного тока, 2 – шунтового постоянного тока, 3 – сериесного постоянного тока, 4 – компаудного постоянного тока с преобладанием ампер-витков встречной последовательной обмотки, 5 – шунтового постоянного тока в режиме стабилизации тока якоря, 6 – асинхронного переменного тока
Степень изменения момента с изменением скорости вращения у разных электродвигателей различна и характеризуется жесткостью их механических характеристик
 (2.2)
(2.2)
Учитывая такой признак, как жесткость, механические характеристики электродвигателей подразделяют на следующие типы:
1 – абсолютно жесткая механическая характеристика (β дв = ∞) – характеристика, при которой скорость вращения с изменением момента остается неизменной. Такой характеристикой обладают синхронный двигатель и компаудный двигатель со встречной последовательной обмоткой;
2 – жесткая или шунтовая механическая характеристика – характеристика, при которой скорость вращения с изменением момента изменяется в малой степени. Такой характеристикой обладают шунтовой двигатель, асинхронный двигатель в пределах рабочей части с малым сопротивлением ротора и компаудный двигатель с преобладанием ампер-витков с параллельной обмоткой;
3 – мягкая или сериесная характеристика – характеристика при которой скорость вращения с изменением момента значительно изменяется. Такой характеристикой обладает сериесный двигатель, асинхронный двигатель в пределах рабочей части с большим сопротивлением ротора и компаудный двигатель с преобладанием ампер-витков последовательной обмотки;
4–поднимающаяся или возрастающая характеристика– характеристика, при которой момент с возрастанием скорости вращения увеличивается. Такой характеристикой обладают асинхронный двигатель в пределах участка разбега и компаудный двигатель с преобладанием ампер-витков встречной последовательной обмотки;
5 – абсолютно мягкая характеристика (β дв = 0) – характеристика, при которой момент с изменением скорости вращения остается неизменным. Такой характеристикой обладает шунтовый двигатель при работе в замкнутых системах электропривода в режиме стабилизации тока якоря.
2.2. Совместная характеристика производственного механизма и электрического двигателя
Работа электрического двигателя и производственного механизма в установившемся режиме соответствует равновесию момента сопротивления механизма М с и вращающего момента двигателя М дв при определенной скорости, т.е. М дв = М с (рис. 2.3). Характеристика 1 соответствует моменту сопротивления М с.1 холостого хода вентилятора и скорости вращения w1, а характеристика 2 получается при большем моменте сопротивления М с.2 и меньшей скорости вращения w2. Изменение момента сопротивления на валу двигателя приводит к тому, что скорость двигателя и момент, который он развивает, могут автоматически изменяться и привод будет продолжать устойчиво работать при другой скорости с новым значением момента. Для восстановления равновесия между изменившимся моментом сопротивления и моментом двигателя роль автоматического регулятора выполняет ЭДС двигателя. Эта особенность двигателя автоматически поддерживать равновесие системы является весьма ценным свойством. С увеличением нагрузки двигатель тормозится, скорость вращения его снижается, благодаря чему уменьшается ЭДС. При уменьшении ЭДС возрастает ток в роторной цепи двигателя и момент развиваемый двигателем до значения, пока не наступит равновесие моментов при скорости вращения w2. Эта новая точка также является общей для механических характеристик вентилятора и двигателя.
Рассмотренные условия работы электропривода в установившемся режиме характеризуют статическую устойчивость привода. При этом изменения во времени скорости вращения и момента происходит относительно медленно. Привод статически устойчив, когда в точке установившегося режима выполняется условие
β дв – β с < 0, (2.3)
При проектировании электропривода механическая характеристика производственного механизма является уже заданной. Поэтому для получения устойчивой работы в установившемся режиме необходимо подбирать механическую характеристику электродвигателя соответствующей формы, что достигается подбором электродвигателя определенного типа и изменением электрических параметров его цепей.
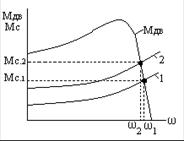
Рис. 2.3. Совместная механическая характеристика асинхронного двигателя и производственного механизма (вентилятора)
2.3. Механические характеристики шунтового электродвигателя постоянного тока и их построение:
а) двигательный режим
Схема включения шунтового двигателя постоянного или независимого возбуждения в двигательном режиме представлена на рис. 2.4.
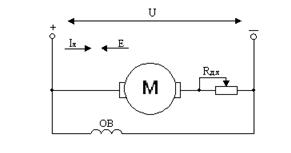
Рис. 2.4. Схема включения шунтового двигателя постоянного тока
Аналитическое выражение механической характеристики может быть получено из уравнения равновесия напряжений для якорной цепи схемы. При установившемся режиме работы приложенное напряжение U уравновешивается падением напряжения в якорной цепи I я(R я+ R д.я) и наведенной в якоре ЭДС Е = ωсФ, то есть
U = I я(R я + R д.я) + Е, (2.4)
где I я – ток в якорной цепи;
R я – внутреннее сопротивление якоря;
R д.я – добавочное сопротивление резистора, включенного в цепь якоря;
ω – скорость вращения якоря;
с – коэффициент, зависящий от конструктивных данных двигателя;
Ф – магнитный поток обмотки возбуждения;
сФ – коэффициент ЭДС
Вращающий момент шунтового двигателя постоянного тока
М дв = кФI я, (2.5)
где к – коэффициент, зависящий от конструктивных данных двигателя;
кФ – коэффициент момента.
В системе СИ коэффициент ЭДС равен коэффициенту момента, т.е. сФ = кФ.
Из выражения (2.4) имеем уравнение скоростной характеристики
 , (2.6)
, (2.6)
и уравнение электромеханической характеристики
 (2.7)
(2.7)
Подставляя выражение для I я в (2.5), получим
 (2.8)
(2.8)
где а =  , b =
, b =  – постоянные величины.
– постоянные величины.
Рассмотрим влияние лишь одного параметра – сопротивления якорной цепи, что необходимо для выяснения основных определений, связанных с понятием о механической характеристике для различных режимов работы двигателя.
Уравнение (2.8) представляет собой аналитическое выражение механической характеристике шунтового двигателя постоянного тока (рис. 2.5). Верхняя характеристика из семейства характеристик носит название естественной механической. Естественной механической характеристикой называется такая характеристика, которая получается при отсутствии добавочных резисторов в якорной цепи и номинальных значениях напряжения U н и магнитного потока Ф н.
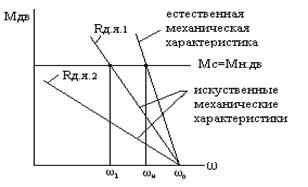
Рис. 2.5. Механические характеристики шунтового двигателя постоянного тока
С введением в якорную цепь добавочных резисторов (реостата) получаются механические характеристики, называемые искусственными или реостатными. Они идут ниже и левее естественной механической характеристики. Эти характеристики прямолинейны и пересекаются в точке идеального холостого хода w 0. Чем больше величина сопротивления добавочного резистора, тем механическая характеристика идет более полого и является более мягкой. Соотношение сопротивления добавочного резистора  .
.
При скорости вращения идеального холостого хода w 0 вращающий момент двигателя М дв=0, ток якоря I я = 0 и значение ЭДС якоря равно напряжению U и направлено навстречу ему. Тогда из выражения (2.4)
 , (2.9)
, (2.9)
Построение механических характеристик шунтового двигателя постоянного тока в двигательном режиме выполняется следующим образом.
В каталогах в основном приводятся следующие номинальные данные двигателя: Р н –мощность, кВт; U н – напряжение В; I н – ток, А; n н – скорость вращения, об/мин; ηн – КПД.
 , (2.10)
, (2.10)
Так как в каталогах сопротивление якоря R я обычно не указывается, то его определяют ориентировочно, принимая, что половина всех потерь в двигателе при номинальной нагрузке связана с потерями в меди якоря. Поэтому
I 2н R я = 0,5 U н I н(1– η н), R я = 0,5  (1– η н). (2.11)
(1– η н). (2.11)
Для построения механических характеристик достаточно иметь координаты двух точек (рис. 2.6), т.к. механическая характеристика двигателя линейна. Удобно построение механических характеристик по точкам, ордината которых соответствует номинальному моменту двигателя М н.дв.




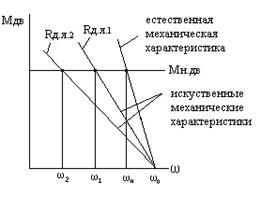
Рис.2.6. Построение механических характеристик шунтового двигателя постоянного тока
Имеем (·)1 – М дв=0, ω = ω 0. (·)2 – М дв= М н.дв, ω = ω н.
(·)3 – М дв= М н.дв, ω = ω 1. (·)4 – М дв = М н.дв, ω = ω 2.
Пользуясь каталожными данными, скорость вращения идеального холостого хода, с-1, вычисляется
 (2.12)
(2.12)
Величина номинального момента, Нм, двигателя определяется по формуле
М н.дв = 9550  , (2.13)
, (2.13)
где Р н – номинальная мощность двигателя, кВт;
n н – номинальная скорость вращения, об/мин
Или в системе СИ
М н.дв = Рн·103/ ω, (2.14)
где ω – угловая скорость вращения, с-1
Значение скорости вращения при вводе сопротивления добавочного резистора в цепь якоря и соответствующая номинальному моменту двигателя определяется из уравнения равновесия напряжений для этой скорости вращения
(·)3 U н – ω 1 сФ = I н(R я + Rд.я.1),
откуда
 (2.15)
(2.15)
(·)4 U н – ω 2 сФ = I н(R я + Rд.я.2),
откуда
 (2.16)
(2.16)

