 2015-02-18
2015-02-18 1605
1605ТИПОВЫЕ СТРУКТУРЫ ПРИВОДОВ С ДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА
Применение приводов с бесступенчатым регулированием позволяет повысить производительность станков благодаря точной настройке оптимальной скорости резания и ее регулированию в процессе выполнения цикла обработки. Для бесступенчатого регулирования скорости в основном применяют приводы с двигателем постоянного тока и тиристорным управлением.
Частота вращения такого двигателя регулируется в двух областях. От минимальной частоты его вращения до номинальной nн регулирование осуществляется изменением напряжения в цепи якоря, при этом на валу двигателя поддерживается постоянный крутящий момент. Выше nн регулирование частоты вращения производится изменением поля возбуждения, и мощность двигателя остается постоянной. Диапазон регулирования Rp бесступенчатых приводов при постоянной мощности составляет 2,5-4. Если этого достаточно для станка, регулируемый электродвигатель постоянного тока с максимальной частотой вращения nдтах =4000...6000 об/мин соединяют непосредственно со шпинделем станка. В том случае, когда требуется более широкий диапазон регулирования частоты вращения шпинделя (в станках с ЧПУ он достигает 50...250), между электродвигателем и шпинделем устанавливают двух-, трех- или четырехступенчатую коробку скоростей, а между приводом и коробкой или между коробкой и шпинделем помещают ременную передачу с передаточным отношением iр = 0,5...2.
|
|
|
Из экономических соображений части Rp = 8...20 общего широкого диапазона R регулирования частоты вращения шпинделя станков с ЧПУ должна соответствовать обработка с постоянной мощностью.
При применении коробки скоростей диапазон Rp получают сочетанием двух, трех или четырех диапазонов R’p (поддиапазонов).
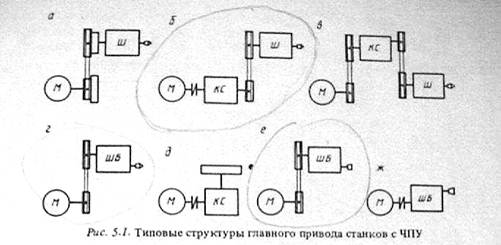
Типовые структуры главного привода токарных станков с ЧПУ приведены на рис 1.
Привод по схеме а включает регулируемый электродвигатель постоянного тока М, двухступенчатую переключаемую ременную передачу и шпиндельный узел Ш. В приводы по схемам б и в входит коробка скоростей КС с автоматическим переключением частоты вращения. Если диапазон регулирования шпинделя с постоянной мощностью Rp = 8... 16, а диапазон регулирования двигателя Rд = 2...2,5, применяют трехступенчатые коробки, при Rд = 3...4.— двухступенчатые. В тех случаях, когда Rp = 16...40 и R = 3..4, в привод встраивают трехступенчатую коробку. Схема г включает шпиндельную бабку ШБ с встроенной коробкой скоростей. Когда Rр=8...16, Rд = 2..3,5, механическую часть привода рекомендуется делать трехступенчатой; при R= 3..4.- двухступенчатой. При Rд = 16...40 механическая часть должна быть соответственно четырех- и двухступенчатой. Приводы по схемам а-г с ременной передачей, способной передавать относительно небольшой крутящий момент, целесообразно применять в токарных станках небольших и средних размеров (наибольший диаметр обрабатываемого изделия 200...400 мм). Приводы по схеме д с двигателем постоянного тока, автоматическим переключаемым редуктором и постоянными передачами на планшайбу рекомендуются для карусельных станков (наибольший диаметр обрабатываемого изделия 1000..4000 мм).
|
|
|
Типовые структуры главного привода станков сверлильно-расточной и фрезерной групп, а также сверлильно-фрезерно-расточных обрабатывающих центров приведены на рис.1 е,ж.
Особенностью является:
1.раздельный привод (отдельный двигатель на привод гл.движения, отдельный двигатель на привод подач и вспомогательные движения).
2.Привод имеет коробку на три диапазона.
3.Используются датчики обратной связи для синхронизации движений.
4.Наличие механизма без люфтового перемещения








