 2015-03-22
2015-03-22 682
682Задачу отыскания оптимального управления можно упростить, заменив переменную в интеграле (9.77). Подставив в выражение (9.77) значение i из уравнения (9.75), придем к следующей формулировке задачи: найти функцию n(τ), доставляющую минимум интегралу (9.77)
 (9.84)
(9.84)
при заданном значении интеграла

Имеем изопериметрическую задачу с промежуточной функцией
 (9.85)
(9.85)
При формулировке о максимальном быстродействии промежуточная функция будет иметь вид:
 (9.86)
(9.86)
При формулировке о максимальной производительности
 (9.87)
(9.87)
Определим форму оптимальных диаграмм для простейшего частного случая, когда момент сопротивления на палу электродвигателя постоянен, т. е. когда m=m0=соnst. Согласно принципу взаимности, уравнения экстремалей не изменятся, будем ли мы решать уравнение Эйлера для L 1, L 2или L 3. Действительно, для L 1уравнение Эйлера имеет вид:
 , (9.88)
, (9.88)
для L 2
 , (9.89)
, (9.89)
для L 3
 . (9.90)
. (9.90)
Решением всех трех уравнений (9.88)…(9.90) является одно и то же семейство кривых — параболы.
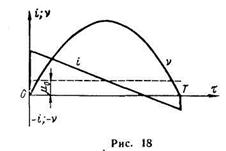
Таким образом, оптимальной диаграммой скорости является парабола, а оптимальная диаграмма тока якоря имеет линейный характер(рис. 9.26).
|
|
|
Рассмотрим подробнее первую формулировку — о минимуме потерь в якоре. Решение уравнения Эйлера (9.88) имеет вид

 (9.91)
(9.91)
|
в него входят три произвольные постоянные. Для их определения имеем три уравнения:
n(0) = n1; n (Т) = n2 и 
Рис. 9.26. Оптимальная диаграмма тока якоря
Из первого уравнения сразу следует, что С 1 = n1. Далее, из системы оставшихся двух уравнений с двумя неизвестными
находим:
 (9.92)
(9.92)
В частности, для наиболее распространенных, нулевых, граничных условий, когда n1 = n2= 0, имеем:
 (9.93)
(9.93)
Интегрируя квадрат тока якоря, получим:
 9.94)
9.94)
Исследуем условие Лежандра. Имеем:
 . (9.95)
. (9.95)
Таким образом, на экстремалях может достигаться минимум Q. Если вычислить потери в якоре при «прямоугольной» диаграмме, то получим:
 (9.96)
(9.96)
Сравним теперь с диаграммами рис. 9.26 «прямоугольную» диаграмму тока, когда ток якоря поддерживается постоянным в период разгона механизма (i = i макc) и в период торможения (i = - i макc). Эта диаграмма долгие годы считалась наилучшей. Качество систем управления оценивалось по коэффициенту заполнения диаграммы тока, т. е. по отношению площади, очерченной диаграммой тока (отдельно за период разгона, при i > 0, и период торможения, при i < 0 ), к площади прямоугольника с тем же основанием и высотой, равной максимальной ординате диаграммы тока. Для «прямоугольной» диаграммы коэффициент заполнения равен единице, для оптимальной диаграммы (рис. 9.26) — 0,5.
Сравнивая выражения (9.96) и (9.94), убеждаемся, что при равной производительности (т. е. равных a и T) «прямоугольная» диаграмма тока с коэффициентом заполнения, равным единице, приводит к увеличению потерь в якоре (в частности, при m 0 = 0 на 33%) по сравнению с линейной диаграммой тока (рис. 9.26) при коэффициенте заполнения 0,5.
|
|
|
Таким образом, вариационное исчисление позволило установить, что коэффициент заполнения диаграммы тока непригоден для оценки систем управления, а также помогло найти действительно оптимальную диаграмму тока.
Формулы (9.94) и (9.96) определяют минимально возможные потери в якоре при заданных a и Т, но если прочесть их справа налево, они позволят определить максимально возможное перемещение при заданных Q и Т, либо минимально возможное время выполнения заданного перемещения при заданном Q.
Переход на оптимальное управление позволяет:
1) увеличить производительность установленного электропривода;
2) при сохранении прежней производительности уменьшить потери энергии в якоре, облегчив этим тепловой режим двигателя и увеличив срок его службы;
3) при сохранении прежней производительности заменить электродвигатель на другой, меньшей мощности.
Пример 9.8. Рассмотрим двигатель КПДН-3-V с независимой обмоткой возбуждения. Мощность двигателя — 8,5 кВт; номинальная скорость вращения — 1300 об/мин= 21,6 об/с,маховой момент двигателя CD2 равен 1 кГ∙м2;номинальный ток — 45 А;допустимая кратность тока 3,6; допустимая скорость вращения — 1560 об/мин,т. е. 1,2 от номинальной скорости. Двигатель через редуктор приводит во вращение исполнительный механизм, причем для отработки полного цикла перемещения двигатель должен повернуться на 130 радиан.
Решение. С учетом момента инерции исполнительного механизма механическая постоянная времени электропривода Т м= 0,7 с, следовательно, единицей угла перемещения будет
α0 = 2π·21,6·0,7 = 95 рад,
таким образом, заданный для отработки в течение цикла угол перемещения будет равен:
α = 130/95 = 1,35.
Цикл перемещения должен занимать 2 с, число циклов — 1000 в час, т. е. 2 с продолжается работа двигателя и 1,6 с — пауза. Момент сопротивления, приведенный к валу двигателя, Мс= 3,2 кГ∙м,в то время как номинальный момент двигателя
Мн= 975·8,5/1300 = 6,4 кГ∙м,
т.е. µ0 = 0,5. Требуется определить, способен ли выбранный двигатель обеспечить заданный темп работы и каковы параметры оптимальной диаграммы тока.
Вычисляем Т:
Т = 2/0,7 = 2,86;

в то время как допустимая величина для Q (принимая условия охлаждения во время работы и во время паузы одинаковыми)
Q доп= 3,6/2 = 1,8.
Следовательно, выбранный нами двигатель при оптимальном законе управления удовлетворяет ограничениям по нагреву, тогда как при законе управления ί — const мы имели бы

т. е. нагрев двигателя превысит допустимый, и потребуется установка более мощного двигателя.
Произведем проверку оптимального закона на величину максимального тока и максимальной скорости в режиме оптимального управления.
Имеем:
следовательно, максимальный ток якоря в начале цикла будет составлять i 0 + µ0 = 1,5, т. е. будет меньше допустимого. Максимальная скорость вращения

т. е. также меньше допустимой.
Изменим условия. Пусть тот же двигатель должен за 2 сотработать перемещение 238 рад,т. е. α = 2,5.
В этом случае в режиме оптимального управления имеем:

Однако
что превышает допустимую скорость. Следовательно, необходимо перейти на режим управления с участком постоянной скорости. Параметры оптимальной диаграммы определяем по формулам:
Таким образом, максимальный ток i max= i 0+ µ0= 2,57, что допустимо. Окончательно, при оптимальном управлении Q = 4,04, т. е. длительность паузы должна составлять 3,04 от длительности работы и допустимое число включений в час
Пример 9.9. Рассмотрим двигатель, разгоняющий механизм, который имеет большой маховой момент, равный 12,08 ∙ 104 кГ∙м2;момент сопротивления механизма— 244 кГ∙м,скорость вращения — 600 об/мин.
|
|
|
Так как наименьшие тепловые потери будут в том случае, когда момент двигателя, разгоняющего механизм, будет равен удвоенному моменту сопротивления, выберем двигатель с моментом Μ = 488 кГ∙м,что при двукратной перегрузочной способности будет соответствовать номинальному моменту Мн= 244 кГ∙ми номинальной мощности
и, следовательно, время разгона исполнительного механизма от нуля до номинальной скорости будет равно 790 с или 13,2 мин (в данном случае время разгона равно механической постоянной времени, т.е. Т = 1).
Определим величину перегрева двигателя в конце цикла разгона. Для двигателя мощностью 150 кВтпостоянная времени нагрева составляет 45 мин,т. е. n = 13,2/45 = 0,294. Следовательно, в конце разгона перегрев обмоток

т. е. будет на 2,4% превосходить нормальный перегрев обмоток в длительном режиме при номинальном токе. Такой перегрев является вполне допустимым.
Так как в данном случае ввиду очень большой величины маховых масс процесс разгона протекает медленно и множитель е-nτ уже заметно отличается от единицы, то при выборе закона управления имеет смысл учитывать теплоотдачу. Оптимальная диаграмма тока будет иметь вид:
Задавшись условием, что в конце цикла разгона перегрев обмоток должен быть равен номинальному, получим два уравнения для определения Т и i 0:
Решив систему, получим: Т = 0,82; i 0 = 2,45. Следовательно, ток якоря в начале разгона равен 2,45 от номинального, а в конце разгона 1,92 от номинального; время разгона будет 0,82·3,2 = 10,8 мин, или на 18% меньше, чем при прямоугольной диаграмме тока.








