 2015-04-12
2015-04-12 7931
7931Нарушения равновесных режимов в АСР происходят под влиянием различных факторов, например, управляющего воздействия, направленного к регулятору от задатчика, или возмущающего воздействия приложенного к объекту регулирования. Системы регулирования ведут себя по отношению к этим воздействиям существенно различным образом. В то время как управляющее воздействие определяет величину и направление изменения регулируемого параметра, возмущающее воздействие не должно существенно влиять на изменение регулируемых параметров
Виды переходных процессов в АСР при единичных ступенчатых воздействиях и (Рис. 1.6)
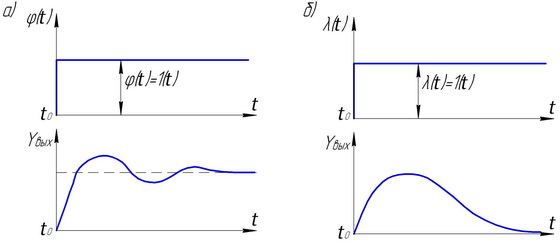
Для устойчивых АСР переходные процессы сходящиеся, т.е. стремится к заданному значению или возвращается к прежнему. В неустойчивых АСР переходные процессы расходящиеся: регулируемый параметр отклоняется от своего заданного значения на большую величину с возрастающей скоростью (Рис. 1.7,а)
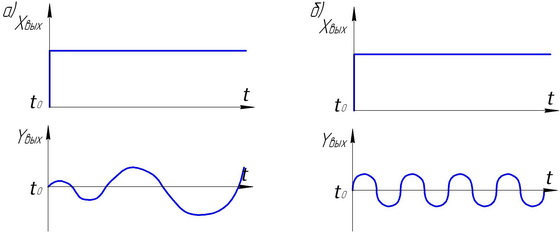
Рис. 1.7 Переходные процессы в АСР: а) неустойчивых, б) находящихся на границе устойчивости.
АСР может находится на границе устойчивости, когда регулируемый параметр не принимает заданного значения и его отклонения имеет постоянную амплитуду отклонения от заданного значения (Рис. 1.7,б). При том или ином воздействии требуемые и действительные значения регулируемой величины могут отличаться друг от друга. Разность между заданным и действительным значением регулируемой величины называется ошибкой регулирования.
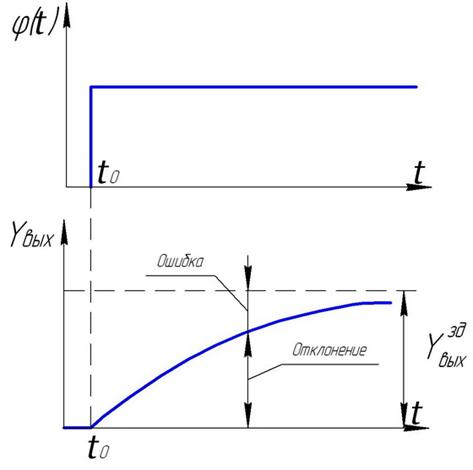
Отклонением регулируемой величины называется разность между значением регулируемой величины в данный момент времени и некоторым фиксированным ее значением, принятым за начало отсчета. Различают динамическую ошибку и отклонение в переходных процессах и ошибку и отклонение в равновесных режимах - статическая ошибка, отклонение.
Технологические процессы, осуществляемые в объектах регулирования, подвержены действию различного рода возмущений. Возмущения нарушают нормальное течение технологического процесса и приводят к отклонению регулируемой величины от заданного значения, т. е. выводят систему автоматического регулирования из состояния равновесия. Автоматический регулятор предназначен восстановить состояние равновесия в системе регулирования.
Способность системы автоматического регулирования восстанавливать состояние равновесия, из которого она была выведена под влиянием тех или иных воздействий, называется устойчивостью.
Устойчивость — важнейшее условие работоспособности автоматической системы регулирования. Если система не способна восстановить состояние равновесия, нарушенное в процессе работы, то для практического использования она непригодна.
Чтобы установить устойчивость конкретной САР, необходимо вывести ее из состояния равновесия. Наблюдая за изменением регулируемой величины, т. е. за переходным процессом, можно определить, устойчива ли данная САР. Если переходный процесс носит затухающий характер, то такая система регулирования устойчива. Если переходный процесс расходящийся, то система регулирования неустойчива.
На систему автоматического регулирования могут действовать два вида возмущений: по нагрузке и по заданию. Возмущения по нагрузке приложены к объекту регулирования. Это изменение количества вещества (или энергии), расходуемого в ходе технологического процесса, т. е. изменение нагрузки объекта.
Возмущения по заданию — это изменение заданного значения регулируемого параметра. Возмущение по заданию приложено к автоматическому регулятору. И то и другое возмущения приводят к возникновению переходного процесса.
При переходе системы автоматического регулирования из одного режима работы в другой она может оказаться устойчивой или неустойчивой.
Если Fпер стремится к нулю хотя бы и за неограниченно большой интервал времени, то система автоматического регулирования устойчива. Если Fпер с течением времени не стремится к нулю, то система регулирования неустойчива.
После действия возмущения в системе регулирования возможны несколько видов переходных процессов. На рисунке изображен переходный процесс, возникающий в САР при изменении задания. Регулируемый параметр монотонно приближается к новому установившемуся значению. В течение переходного процесса Fпер стремится к нулю. Такой переходный процесс является затухающим, а система устойчивой.
При переходном процессе, который носит расходящийся характер, с течением времени Fпер не стремится к нулю, а возрастает монотонно. Такая система регулирования неустойчива, т. к. регулируемая величина не подходит к заданному значению.
При колебательном затухающем переходном процессе регулируемая величина F совершает несколько колебаний около нового установившегося значения и переходит в новое равновесное состояние. Амплитуда колебаний уменьшается с течением времени. Такая система регулирования является устойчивой.
При колебательном переходном процессе, возникающем в неустойчивой системе автоматического регулирования), амплитуда колебаний с течением времени увеличивается, т. е. Fпер не стремится к нулю, а возрастает.
Если регулируемая величина после действия возмущения не приходит к заданному значению, но и не возрастает бесконечно, а изменяется с постоянной амплитудой, то такие системы регулирования находятся на границе устойчивости.
Таким образом, об устойчивости систем можно судить по характеру их переходного процесса. Переходные процессы, протекающие в системах автоматического регулирования, описываются математическими уравнениями. Регулируемый (выходной) параметр и его производные записываются в левой части уравнения, возмущение (входной) параметр и его производные - в правой части.
Характер переходного процесса зависит как от свойств самой системы, так и от вида возмущающего воздействия Следовательно, чтобы определить, устойчива ли система нужно составить ее дифференциальное уравнение и решить его При этом будет найден закон изменения регулируемого параметр во времени, т. е. построен переходный процесс. Но решение дифференциальных уравнений высокого порядка чрезвычайно сложно. Поэтому были разработаны способы, которые позволяют установить устойчивость системы, не решая ее дифференциального уравнения. Признаки, позволяющие определить, устойчива ли система без решения ее дифференциального уравнения, называются критериями устойчивости.
11. Нахождение кривой разгона. Методы обработки экспериментальных данных.

