 2015-04-12
2015-04-12 2197
2197Для анализа движений различных органов станков применяют упрощенные, условные схемы механизмов, дающие наглядное представление о кинематике станков и в некоторой степени представление об их конструкции. Такие схемы называются кинематическими и для их вычерчивания применяют условные обозначения по ГОСТ 2.770-68. Условные обозначения соединения детали с валом показаны в табл. 1.
Таблица 1
Обозначения соединения детали с валом
| № | Наименование обозначения соединения детали с валом | Условное обозначение |
| Свободное при вращении | 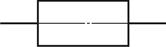
| |
| Подвижное | 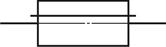
| |
| При помощи вытяжной шпонки | 
| |
| Глухое | 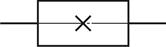
|
Кинематическая схема станка состоит из отдельных кинематических цепей, представляющих собой систему последовательно расположенных взаимодействующих звеньев, связывающих движение одного рабочего органа станка с другим или с источником движения. Кинематические цепи могут иметь как постоянные взаимодействующие звенья, так и сменные (регулируемые).
|
|
|
Наиболее часто в схемах станков встречаются множительные механизмы с передвижными блоками зубчатых колес рис.7.
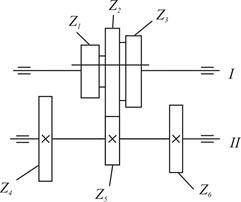
Рис. 7. Множительный механизм с передвижным блоком колес
На ведущем валу (вал I) находится блок из трех цилиндрических зубчатых колес (Z1, Z2, Z3), имеющий возможность перемещаться вдоль оси вала. На втором (ведомом) валу располагаются отдельно стоящие, глухо соединенные с валом зубчатые колеса Z4, Z5 и Z6. Перемещением блока зубчатых колес по оси ведущего вала включают в работу пары зубчатых колес Z2 - Z5, Z1 – Z4 и Z3 – Z6, тем самым получая три различных передаточных отношения (i1, i2, i3)
 .
.
На рис. 8 показан множительный механизм с постоянным зацеплением. На ведомом валу расположена фрикционная муфта (МФ), позволяющая за счет сил трения передавать вращение с зубчатого колеса на вал. При работе такого соединения возможно получить два передаточных отношения (i1, i2)
Передаточное отношение цепи, состоящее из m последовательно включенных передач, равно произведению передаточных отношений отдельных передач
 .
.
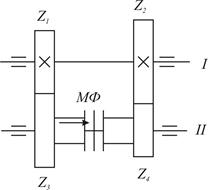
Рис. 8. Множительный механизм с постоянным зацеплением колес
Частота вращения последнего звена цепи определяется путем составления уравнения кинематического баланса
 .
.
В связи с тем, что любой металлорежущий станок рассчитывается для обработки изделий в определенном интервале размеров, зависящих от габаритов станка и предельных скоростей резания, то частота вращения шпинделя должна находиться в пределах регулирования от nmin до nmax.
Русским академиком А.В. Годолиным была доказана целесообразность построения ряда частот вращений рабочего органа по геометрической прогрессии. Геометрический ряд позволяет создавать сложные коробки передач из простых двухваловых механизмов. Кроме того, такие приводы обеспечивают выбор наиболее экономически выгодных режимов резания, поскольку при переходе с одной ступени на соседнюю при неизменном размере обрабатываемой поверхности относительная потеря скорости одинакова для всех ступеней.
|
|
|
Таким образом, ряд значений скоростей рабочих движений, построенный по геометрической прогрессии со знаменателем j может быть представлен следующим образом
где Rn – диапазон регулирования.
Вычислив фактические значения минимальной и максимальной частот вращения, можно определить значение знаменателя геометрической прогрессии и относительную потерю скорости, выраженную в процентах и называемую перепадом скоростей
Значения знаменателя ряда частот вращения стандартизированы и устанавливаются в соответствии с рядом предпочтительных чисел, основные из которых приведены в табл. 2.
Таблица 2
Стандартизированный ряд значения знаменателя
| j | 1,06 | 1,12 | 1,26 | 1,41 | 1,58 | 1,78 | |
 А А
| »5 |








