 2015-04-12
2015-04-12 3528
3528Цифровой датчик скорости обладает большей точностью по сравнению с тахогенераторами. Он состоит из двух основных частей: импульсного преобразователя скорости (ИП) и кодового преобразователя (КП).
Импульсный преобразователь ИП преобразует угловую скорость вала в импульсы напряжения частотой f, пропорциональной скорости вращения вала. ИП может быть выполнен на основе кодового диска с окнами, расположенными на двух концентрических дорожках (рис. 8.16а). Две дорожки используются для того, чтобы определить направление вращения диска (вала). Окна внутренней дорожки сдвинуты на определенный небольшой угол по отношению к окнам внешней дорожки, как показано на рис. 8.16а.
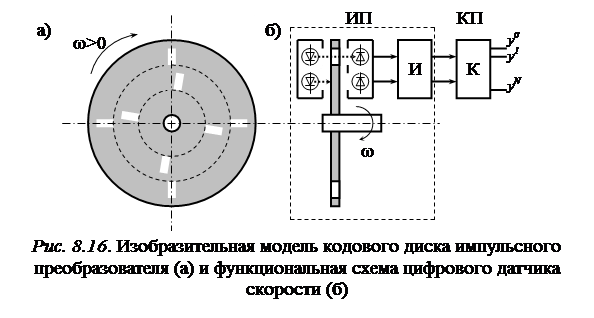 |
Когда диск вращается с некоторой угловой скоростью ω, излучение от источников (светодиодов) через окна дорожек периодически попадает на фотодиоды (рис. 8.16б). При этом проводимость фотодиодов увеличивается. По сигналам с фотодиодов в блоке формирования импульсов И вырабатываются импульсы частотой
 ,
,
где n - количество окон на дорожке (на рис. 8.19а четыре окна на дорожке). Длительность τ импульса напряжения UH, формируемого от окна наружной дорожки, и импульса UB от окна внутренней дорожки тем меньше, чем больше скорость ω.
Принцип формирования выходных сигналов Uω>0 и Uω<0 блоком И в зависимости от направления вращения кодового диска иллюстрируется на рис. 8.17.
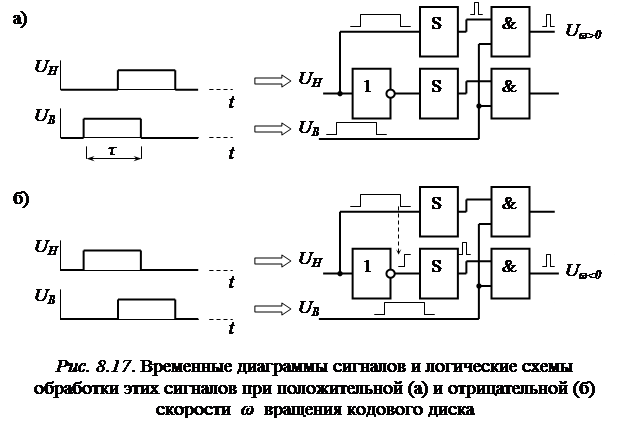 |
В блоке формирования импульсов И предусматривается одновибратор S, который генерирует на выходе одиночный импульс малой длительности τS (τS<<τ). Запускается одновибратор передним фронтом входного импульса. Выходной сигнал импульсного преобразователя ИП снимается с одного из двух его выходов в зависимости от направления вращения кодового диска. Импульсы частотой fИ длительностью τS поступают из ИП в кодовый преобразователь.
Кодовый преобразователь КП (см. рис. 8.16б) – счетчик импульсов - суммирует импульсы ИП за период времени Т (T>> 1/ fИ) и формирует с периодичностью 1/ Т цифровой код yN … y1 y0 суммарного количества импульсов
 . (8.7)
. (8.7)
Величина nT характеризует среднее значение скорости ω на интервале времени Т. Погрешность измерения скорости определяется зависимостью
δ ω= 1/ nT, (8.8)
так как младшему разряду y0 КП соответствует один импульс.
Повышение точности цифрового датчика скорости достигается путем увеличения количества n окон на каждой дорожке кодового диска (реально n >>4) и путем увеличения интервала времени Т суммирования импульсов. Однако чрезмерное увеличение Т приводит к росту отклонения среднего значения скорости, определяемого числом yN … y1 y0, от мгновенного значения ω. Из выражений (8.8) и (8.7) также следует, что погрешность δ ω возрастает при малых скоростях ω. Поэтому для цифрового измерения малых значений ω применяют другой способ формирования цифрового кода – подсчитывается количество создаваемых высокочастотным генератором опорных импульсов, которые умещаются на интервале между двумя соседними импульсами на выходе импульсного преобразователя. Этот способ дает погрешность, возрастающую с увеличением скорости ω.

