 2015-04-17
2015-04-17 687
687Привод, кинематическая схема которого приведена на рисунке 2.4, работает в следующем режиме: передвижение тележки массой mТ=400кг с грузом mгр=200кг на расстояние L=10м со скоростью ν1=0,4м/с, торможение, стоянка t 0=10 секунд, движение в обратном направлении без груза на тоже расстояние со скоростью ν2=0,5м/с, торможение. Диаметр колеса тележки  =0,5м, радиус оси колеса тележки
=0,5м, радиус оси колеса тележки  =0,01м, передаточное число редуктора iр= 47 и КПД механической передачи η=0,75 и момент инерции двигателя и Jдв =0,007кг·м2. Время пуска и торможения одинаково t=tп=tт=1с.
=0,01м, передаточное число редуктора iр= 47 и КПД механической передачи η=0,75 и момент инерции двигателя и Jдв =0,007кг·м2. Время пуска и торможения одинаково t=tп=tт=1с.
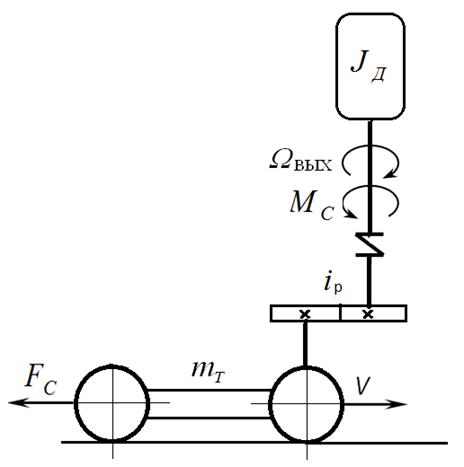
Рис. 2.4 – Кинематическая схема механизма передвижения тележки крана:
Построение тахограммы








