 2015-05-06
2015-05-06 824
8241. Динамика точки.
Груз 1 массой m начинает двигаться из состояния покоя вдоль гладкой горизонтальной плоскости под действием силы, пропорциональной времени F = kt. Найтизакон движения груза.
Проверяемые умения и навыки:
1. Составление расчетной схемы.
2. Запись общей математической модели прямолинейного движения материальной точки.
3. Составление дифференциального уравнения движения груза.
4. Запись начальных условий.
5. Интегрирование дифференциальных уравнений движения.
2. Прямолинейные колебания материальной точки.
К нижнему концу недеформированной пружины жесткости  подвешивают груз массой m и отпускают без начальной скорости. Найти закон движения груза.
подвешивают груз массой m и отпускают без начальной скорости. Найти закон движения груза.
Проверяемые умения и навыки:
1. Составление расчетной схемы.
2. Запись общей математической модели прямолинейного движения материальной точки.
3. Составление дифференциального уравнения вертикальных колебаний груза.
4. Запись начальных условий.
5. Определение закона движения груза.
3. Теорема об изменении кинетического момента.
|
|
|
Определитьугловую скорость вращения вертикального вала 1 с жестко прикрепленной к нему трубкой 2 длиной l при перемещении по ней шарика 3 массой m от оси вращения до выходного отверстия. В начальный момент времени угловая скорость вала  . Массой вала пренебречь, момент инерции трубки относительно оси вращения I.
. Массой вала пренебречь, момент инерции трубки относительно оси вращения I.
Проверяемые умения и навыки:
1. Расстановка сил.
2. Запись общей математической модели в виде теоремы об изменении кинетического момента в скалярной форме.
3. Определение главного момента внешних сил.
4. Определение кинетического момента механической системы.
5. Нахождение угловой скорости вала.
4. Определение кинетической энергии механической системы.
Груз 1 массой m опускается на невесомой нити, перекинутой через невесомый неподвижный блок 2, заставляя при этом ступенчатое колесо 3 катиться без скольжения по горизонтальному рельсу. Масса ступенчатого колеса равна М, радиусы ступеней R и r. Радиус инерции колеса относительно оси, проходящей через центр масс, равен r. Найти кинетическую энергию механической системы, выразив ее через скорость груза 1.
Проверяемые умения и навыки:
1. Определение вида движения входящих в систему тел и запись формул, определяющих кинетическую энергию.
2. Установление кинематического соотношения между скоростью груза и скоростью центра катка.
3. Установление кинематического соотношения между скоростью груза и угловой скоростью катка.
4. Определение кинетической энергии каждого тела.
5. Определение кинетической энергии механической системы, выраженной через скорость груза.
|
|
|
5. Определение работы внешних сил, действующих на механическую систему.
Груз 1 массой m опускается на невесомой нити, перекинутой через невесомый неподвижный блок 2, заставляя при этом ступенчатое колесо 3 катиться без скольжения по горизонтальному рельсу. Качению препятствует постоянный момент сопротивления  . Масса ступенчатого колеса равна М, радиусы ступеней R и r. Найти сумму работ внешних сил, действующих на механическую систему, выразив ее через перемещение груза 1.
. Масса ступенчатого колеса равна М, радиусы ступеней R и r. Найти сумму работ внешних сил, действующих на механическую систему, выразив ее через перемещение груза 1.
Проверяемые умения и навыки:
1. Расстановка внешних сил.
2. Установление кинематического соотношения межу перемещением груза и углом поворота катка.
3. Определение работы сил тяжести.
4. Определение работы момента сопротивления.
5. Запись суммарной работы, выраженной через перемещение груза.
6. Принцип Даламбера.
К вертикальному валу АВ, вращающемуся с постоянной угловой скоростью ω, жестко прикреплены два стержня. Стержень ОD образует с валом угол φ, стержень ОС перпендикулярен плоскости, содержащей вал АВ и стержень ОD. К концам стержней прикреплены два шара С и D, которые можно считать материальными точками массой m каждый. Массами стержней пренебречь. Даны размеры: ОС = ОD = l, АВ = 2 h.
Определить динамические реакции в подпятнике А и подшипнике В.
Проверяемые умения и навыки:
1. Запись общей математической модели в виде принципа Даламбера.
2. Расстановка сил инерции.
3. Вычисление сил инерции.
4. Составление уравнений кинетостатики.
5. Определение динамических реакций.
7. Принцип виртуальных перемещений.
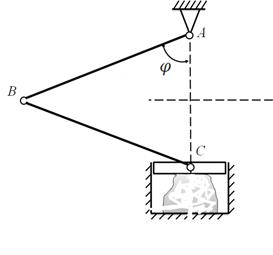
На шарнир В коленчатого пресса действует в его плоскости горизонтальная сила Р. Найти уравновешивающую силу Q, приложенную в точке С.
АВ = ВС = l.
Проверяемые умения и навыки:
1. Расстановка активных сил
2. Запись общей математической модели в виде принципа виртуальных перемещений.
3. Установление связи между виртуальными перемещениями точек приложения активных сил.
4. Запись условия равновесия в аналитической форме.
5. Определение уравновешивающей силы.
8. Вычисление обобщенных сил.
Дана система из двух блоков, подвижного 1 массой  и радиусом R, неподвижного 2 массой
и радиусом R, неподвижного 2 массой  и радиусом r, и груза 3 массой
и радиусом r, и груза 3 массой  , движущегося по гладкой горизонтальной поверхности. Тела системы соединены между собой гибкой нерастяжимой нитью, как указано на рисунке. На груз 3 действует горизонтальная сила F. В блоке 2 возникает момент сил трения
, движущегося по гладкой горизонтальной поверхности. Тела системы соединены между собой гибкой нерастяжимой нитью, как указано на рисунке. На груз 3 действует горизонтальная сила F. В блоке 2 возникает момент сил трения  .
.
Выбирая в качестве обобщенных координат разность уровней расположения осей подвижного и неподвижного блоков, а также угол поворота второго блока найти обобщенную силу, соответствующую одной из координат.
Проверяемые умения и навыки:
1. Составление расчетной схемы с указанием обобщенных координат и активных сил.
2. Запись математического выражения для нахождения обобщенных сил.
3. Установление кинематических связей между виртуальными перемещениями.
4. Определение суммы виртуальных работ активных сил.
5. Определение обобщенной силы.








