 2015-04-30
2015-04-30 4142
4142Расчетное расстояние видимости – расстояние на которое водитель должен видеть впереди себя дорогу,чтобы остановиться перед препятствием или объехать его.
Различают Расчетное расстояние видимости:
1) для остановки автомобиля перед неподвижным препятствием;
2) для обгона тихоходного авто
3) боковая видимость
По первой схеме расчетное расстояние видимости S1 называют видимостью поверхности дороги,
S1 = Vp tp / 3,6 + Kэ Vp2 / [254 (φ1 ± i)] + lзап,
где Vp – расчетная скорость движения автомобиля (км/ч) для дороги принятой технической категории;
tp – время реакции водителя и включения тормозов, tp = 2,6 с;
Kэ – коэффициент, учитывающий эффективность действия тормозов, принимается 1,4;
φ1 =коэффициент продольного сцепления;
i – продольный уклон участка дороги, равный максимально допустимому для принятой категории дороги;
lзап – зазор безопасности (lзап = 5м).
В РБ принято торможение при сухом покрытии с коэффициентом сцепления φ=0,6 на спуске
Расстояние видимости при обгоне.
Определяется для вдухполосных дорог с двумя сторонами движения
Общая формула отсуствует
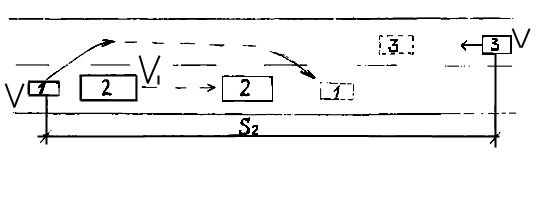
1,3 –легковые авто
2-грузовой авто
Расчетное расстояние  зависит от разности скоростей легковых и грузовых авто.
зависит от разности скоростей легковых и грузовых авто.
В РБ расчётное расстояние видимости не нормируется для обгона.
Боковая видимость должна быть обеспечена на участках дорог, на которых с придорожной полосы могут попадать пешеходы, животные.
Вычисляем время движения авто и пешехода до точки А
Боковую видимость вычисляют по формуле
Lбок = 2S1 Vn / V,
где Vn - скорость бегущего пешехода, пересекающего дорогу (Vn = 10 км/ч);
Vp – расчетная скорость движения автомобиля для дороги принятой технической категории;
S1 - расчетное расстояние видимости по первой схеме.

В РБ расчет боковой видимости прилегающей полосы местности принимается 25 м на дорогах I – II категорий, для III и IV – 15 м. L бок считается от кромки проезжей части.
Высотное положение ад определяет проектная линия
На дорогах II-IV категории проектная линия относится к оси дороги. На а.д. первой категории к оси проезжей части одного направления. Проектная линия состоит из прямолинейных и криволинейных участков. Криволинейные участки описываются кривыми постоянной и переменной кривизны. Постоянную кривизну имеют круговые кривые. Круговые кривые рассчитываются по формуле:

Минимальный радиус вертикальной кривой рассчитывается исходя из обеспечения видимости для остановки S1.
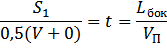
 Радиус выпуклой кривой R мин вып. Определяется исходя из обеспечения расчетной видимости S1 необходимой для остановки перед неподвижным препятствием высотой h2=0,2 м.
Радиус выпуклой кривой R мин вып. Определяется исходя из обеспечения расчетной видимости S1 необходимой для остановки перед неподвижным препятствием высотой h2=0,2 м.
Обеспечение видимости на вертикальных кривых:
Rвып.min=S12 / (2*(√h1+√ h2)2),
где h1 − высота расположения глаз водителя легкового автомобиля; h2 − высота препятствия;
Для обеспечения обгона рекомендуется принимать радиус выпуклой кривой:
Rвып.рек=S22 / (2*(√h1+√ h2)2).
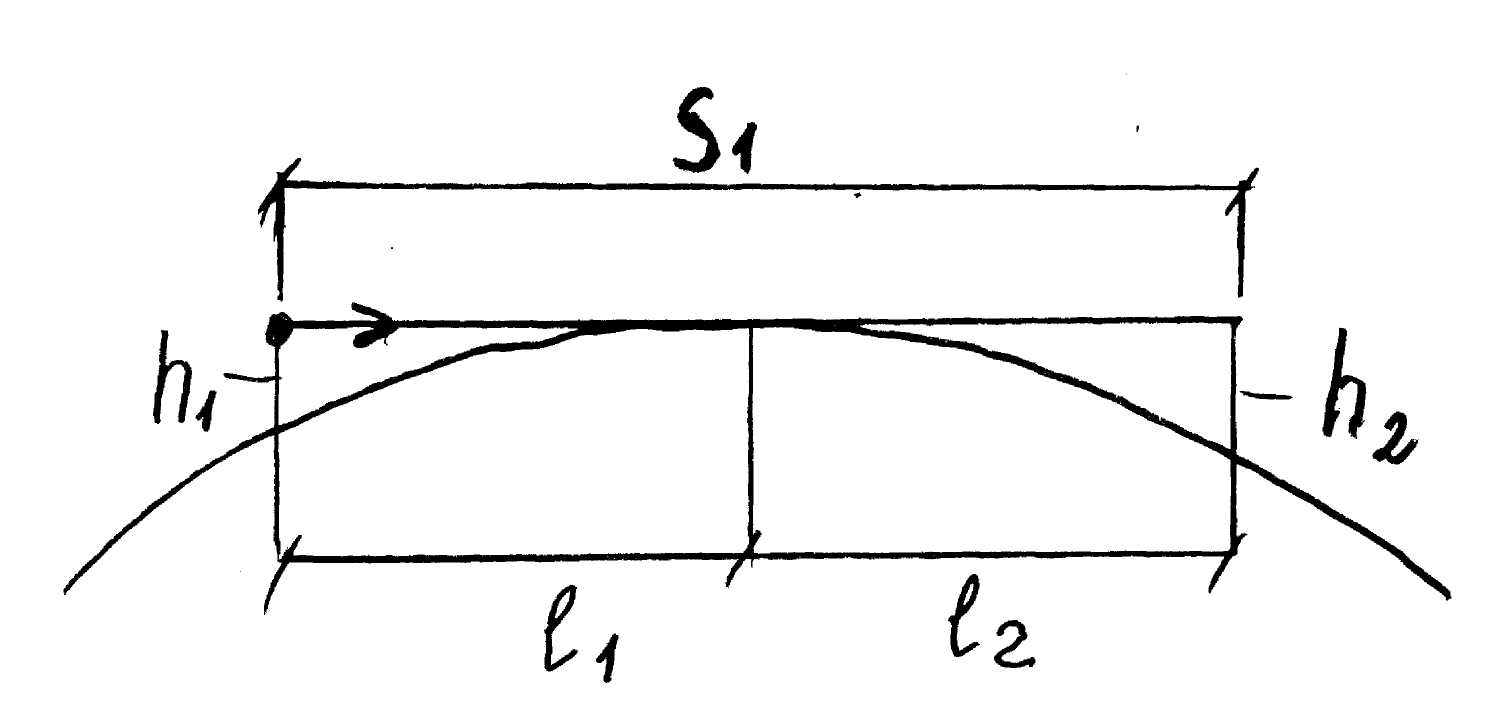
Целесообразно минимальный радиус вогнутой кривой назначать исходя из обеспечения ночной видимости:
Rвог.min=S12 / (2*(hф+ S1*tgα)),
где hф − высота расположения фар над дорогой.
α-угол отклонения пучка света фар 2-4гр.
Разрешается не сопрягать вертикальными кривыми переломы 2 промиля и менее на дорогах II и III категории, 5 промилей и менее на дорогах III и IV категории с усовершенствованным покрытием, 20 промилей и менее на дорогах IV и V c переходным покрытием. При этом длинна участка ломаной не должна быть менее 150м.

