 2015-05-10
2015-05-10 321
3212.1. Исследуем систему управления (СУ), составленную из параллельно соединенных звеньев. Дифференциальное уравнение СУ:
При K=10, Т=0,14с. Перейдем к операторному виду, совершив замену d/dt=s и выведем передаточную функцию (ПФ) СУ:


ПФ СУ соответствует ПФ форсирующего звена 1-го порядка. Для получения такой СУ необходимо параллельно соединить усилительное и дифференцирующее звенья:

Где T'=K*T.
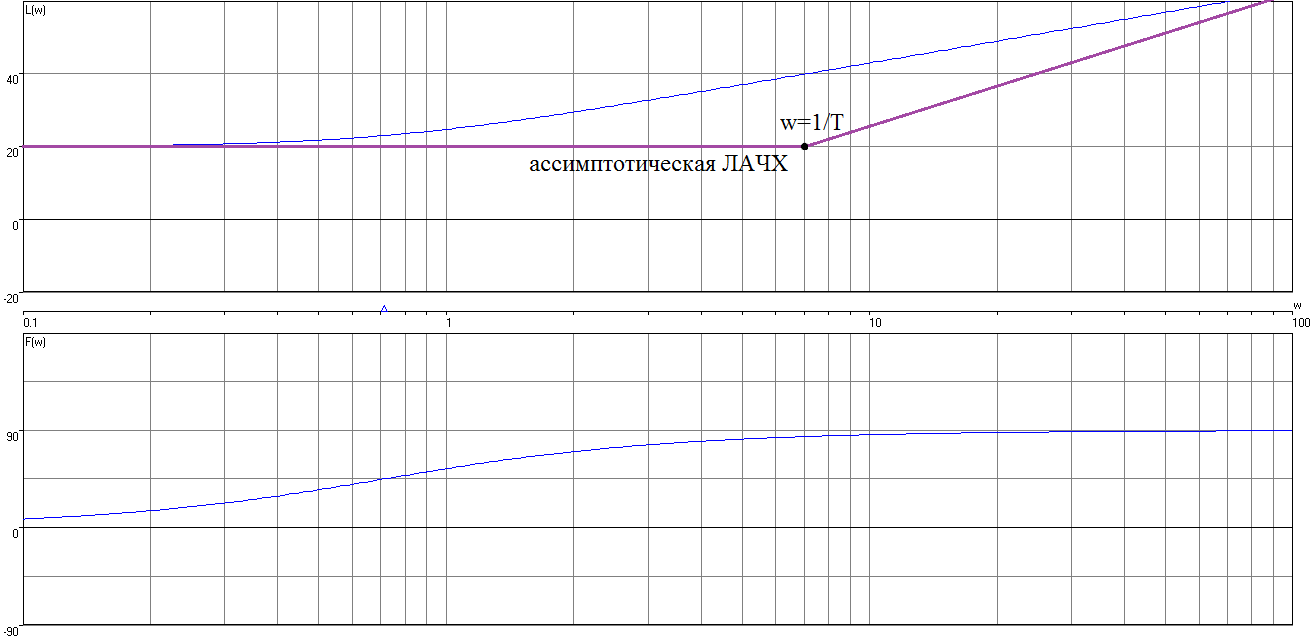
Рисунок 19 – ЛАЧХ и ЛФЧХ (наклон «0», «+1»)
При ω=1/T=1/0,14=7,1429рад/с:
· L(ω)=40,12дБ/дек;
· φ(ω)=84,34о.
2.2. Исследуем СУ, составленную из параллельно соединенных звеньев. Дифференциальное уравнение СУ:
При K=10, Тu=T=0,14с. Перейдем к операторному виду, совершив замену  =1/s и выведем ПФ СУ:
=1/s и выведем ПФ СУ:
Для получения такой СУ необходимо параллельно соединить усилительное и интегрирующее звенья:

Где T'=K/T.
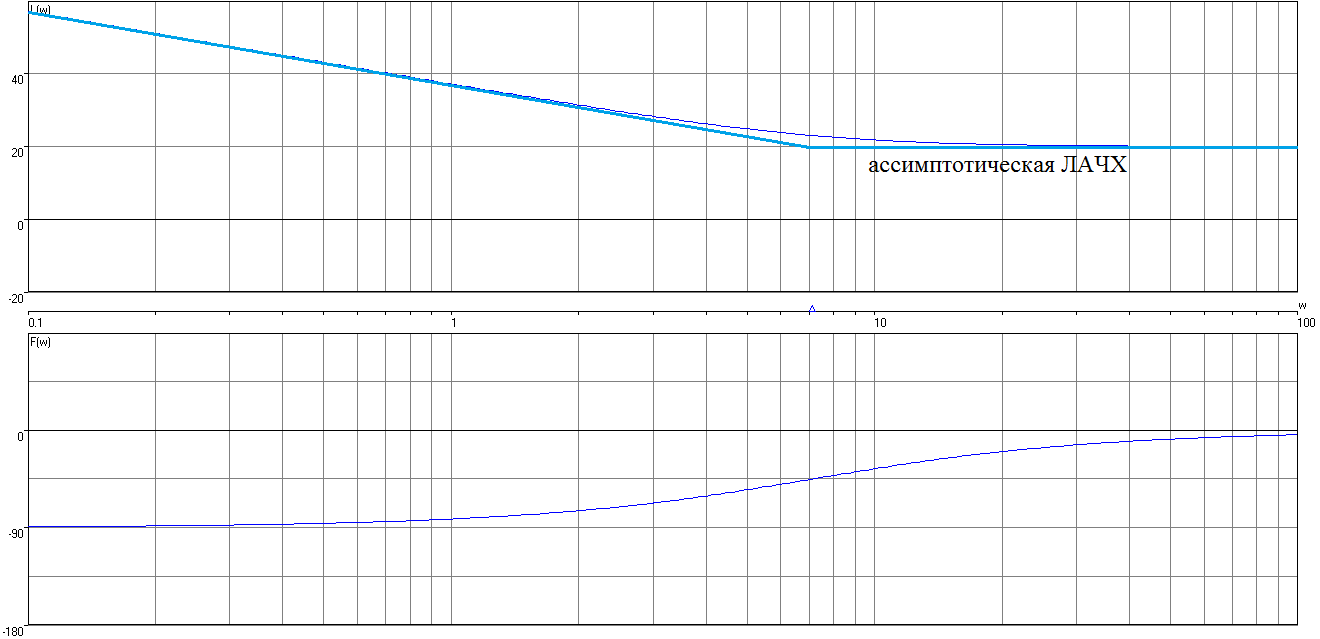
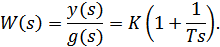
Рисунок 20 – ЛАЧХ и ЛФЧХ (наклон «-1», «0»)
2.3. Исследуем СУ, составленную из параллельно соединенных звеньев. Дифференциальное уравнение СУ:

При K=10, Тu=T=0,14с. Перейдем к операторному виду, совершив замену =1/s, d/dt=s и выведем ПФ СУ:



Для получения такой СУ необходимо параллельно соединить усилительное, интегрирующее и дифференцирующее звенья:

где T'=K/T, T''=K*T.
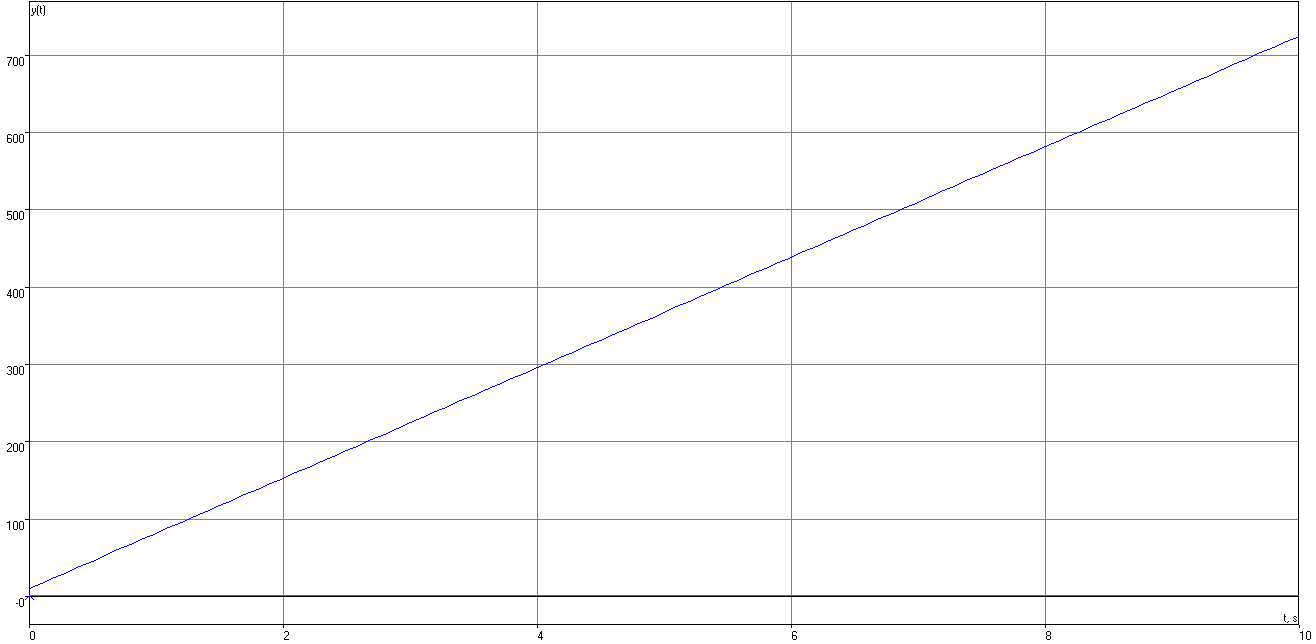
Рисунок 21 – Переходная характеристика
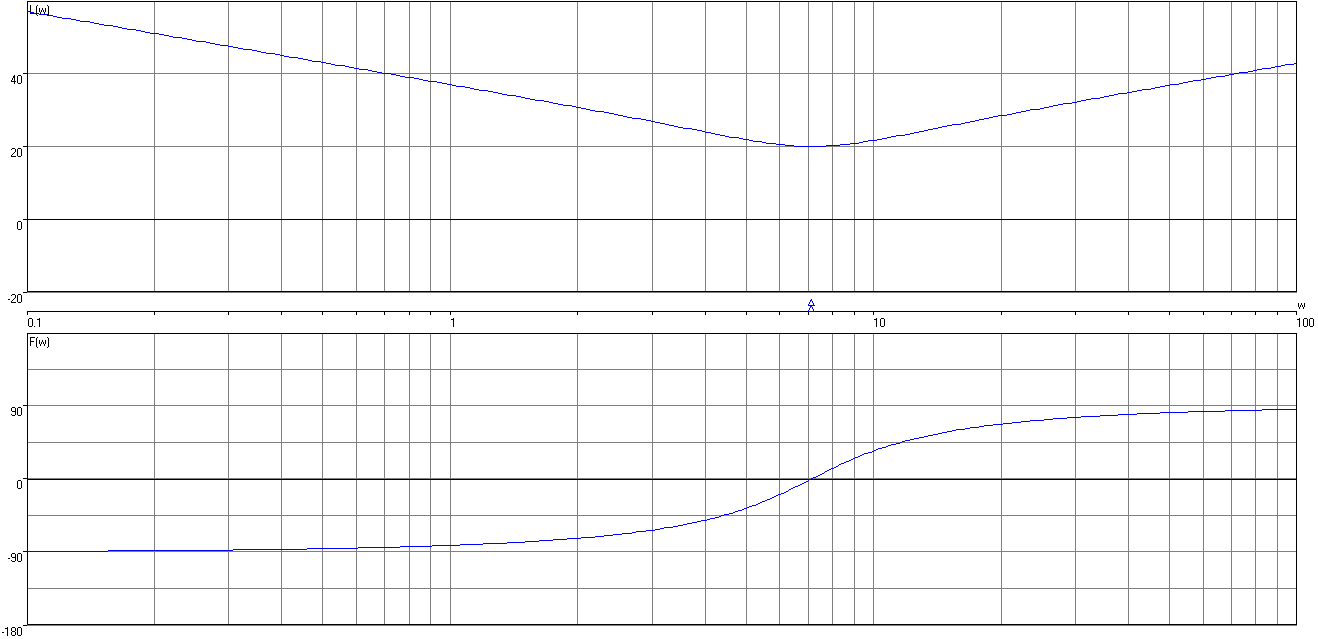
Рисунок 22 – ЛАЧХ и ЛФЧХ (наклон «-1», «+1»)








