При приложении воздействия к какому либо объекту (элементу или системе автоматики) из-за инерционности объекта возникает переходный процесс, который через некоторое время заканчивается. После окончания переходного процесса объект работает в режиме, который называется установившимся. Например, если на электродвигатель подать напряжение питания, то после его разгона (переходного процесса) установится определенная частота wд вращения его вала (установившийся режим) (рис. 2.8.1).
Установившиеся режимы бывают 2-х типов: статические и динамические.
Если после окончания переходного процесса выходная величина объекта остается постоянной при постоянном воздействии, то такой установившийся режим является статическим.
Рис. 2.8.1 Переходный процесс и установившийся режим работы электродвигателя после подачи на него напряжения питания
Статический режим отражает статическая характеристика объекта.
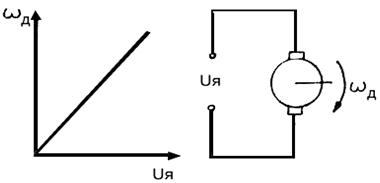
Статической характеристикой называется зависимость между постоянным входным воздействием и постоянной выходной величиной объекта в установившемся режиме (после окончания переходного процесса). Например, для электродвигателя постоянного тока статическая характеристика представляет собой зависимость между напряжением
U я, подаваемым на якорь, и выходной величиной ¾ частотой w
д вращения ротора (рис. 2.8.2).
Рис. 2.8.2 Статическая характеристика электродвигателя и поясняющая схема
Динамические установившиеся режимы могут возникать при постоянном воздействии на объект и воздействии, изменение которого носит установившийся характер.
Примерами установившихся динамических режимов при постоянных воздействиях являются автоколебания, возникающие в нелинейных системах. Примером установившихся динамических режимов при установившемся воздействии является реакция линейного звена или линейной системы на гармоническое входное воздействие (см. частотные характеристики линейных систем и звеньев) и т. д.
 2015-05-13
2015-05-13 4850
4850