Под связью в механике понимают условия накладывающие ограничения на свободу перемещения точек системы.
| № пп | Тип связи | Определение |
| 1.1 | Кинематические (дифференциальные) | – это связи накладывающие условия на кинематические характеристики, т.е. на положения точек(координаты), скорости и ускорения. В аналитической механике изучаются только кинематические связи. |
| | 1.1.1. Геометрические (конечные) | – это связи, накладывающие ограничения только на положения точек системы (координаты). |
| | 1.1.2. Негеометрические | – это связи, накладывающие ограничения не только на положения точек системы, но и на их скорости и ускорения. |
| 1.2 | Динамические | – это связи накладывающие условия самого общего вида на изменение динамических характеристик, т.е. массы, импульсы, энергию и др. Динамические связи изучаются в теории управления движениями и процессами; данная отрасль науки находится на стыке ряда наук, в частности аналитической механики и вариационного исчисления. |
Практически связи осуществляются с помощью материальных тел или приспособлений (стержней, нитей, подшипников, шарниров и т.п.), с которыми соприкасается данная механическая система при своем движении.
| № пп | Тип связи | Определение | Пример |
| 2.1 | Внутренние | – это связи, которые будучи наложены на точки системы, не препятствуют системе свободно перемещаться после того, как она внезапно отвердеет | Рассмотрим механическую систему – составную конструкцию (АВ + ВС). 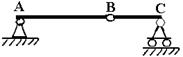 Шарнир в точке В – внутренняя связь. Шарнирно неподвижная опора в точке А и шарнирно подвижная опора в точке В – внешние связи. Шарнир в точке В – внутренняя связь. Шарнирно неподвижная опора в точке А и шарнирно подвижная опора в точке В – внешние связи. |
| 2.2 | Внешние | – это связи, которые будучи наложены на точки системы, не позволяют системе свободно перемещаться |
Мы будем представлять связи схематически в виде геометрических линий, точек и поверхностей.
При этом связи в аналитической механике могут быть выражены математически в виде уравнений или неравенств, связывающих между собой координаты, скорости и ускорения точек системы, а также время:
 где n – число точек системы.
где n – число точек системы.
Такие соотношения называются уравнениями связей.
| № пп | Тип связи | Определение | Уравнение связи | Примеры |
| 3.1 | Удерживающие (двусторонние или неосвобождающие) | – это связи, которые сохраняют свое действие во все время движения точек системы. Они препятствуют перемещениям механической системы в некоторых направлениях, а также в направлениях прямо противоположных. Чаще всего удерживающие связи вводятся в соответствии с условием, что точки системы должны находится на некоторых кривых или поверхностях в пространстве, или расстояния между ними не должны меняться и т.п. | уравнения задаются строгими равенствами. | Рассмотрим невесомый, недеформируемый стержень, соединяющие материальные точки  и и  . . 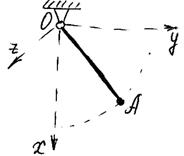 Точки и не могут ни приблизится, ни отдалиться. При этом точка может перемещаться по кривой, лежащей на сфере радиуса Точки и не могут ни приблизится, ни отдалиться. При этом точка может перемещаться по кривой, лежащей на сфере радиуса  . Т.о. координаты точки связаны зависимостью . Т.о. координаты точки связаны зависимостью  , которая является уравнением удерживающей геометрической связи. , которая является уравнением удерживающей геометрической связи. |
| 3.2 | Неудерживающие (односторонние или освобождающие) | – это связи, которые могут в некоторые промежутки времени прекращать и возобновлять свое действие. Чаще всего такого рода связи препятствуют перемещениям материальных точек механической системы в некоторых направлениях, но допускают перемещения в прямопротивоположных направлениях. Обычно подобные связи имеют место в тех случаях, когда запрещается пребывание точек в некоторой части пространства. | уравнения задаются неравенствами. | Точки и соединены нерастяжимой нитью.  Они не могут отдалиться друг от друга, но имеют возможность приблизиться (при этом произойдет смятие нити). Уравнение связи в этом случае имеет вид: Они не могут отдалиться друг от друга, но имеют возможность приблизиться (при этом произойдет смятие нити). Уравнение связи в этом случае имеет вид:  . Знак равенства соответствует натянутой нити. . Знак равенства соответствует натянутой нити. |
| | | | | | |
| № пп | Тип связи | Определение | Уравнение связи | Примеры |
| 4.1 | Стационарные (склерономные) | – это связи, не зависящие явно от времени. | уравнения не содержат в явном виде время t. | 1. См. примеры связей п.3.1 и п.3.2. 2. Рассмотрим кривошипно–ползунный механизм. 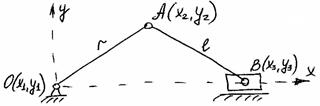 Определяя произвольные положения трех точек механизма, получаем пять уравнений связей: Определяя произвольные положения трех точек механизма, получаем пять уравнений связей:  Первые три уравнения системы выражают неподвижность точки , скольжение точки Первые три уравнения системы выражают неподвижность точки , скольжение точки  по оси по оси  ; четвертое и пятое уравнения системы выражают неизменяемость расстояний ; четвертое и пятое уравнения системы выражают неизменяемость расстояний  и и  . Все пять уравнений дают зависимость между координатами трех точек. В уравнения . Все пять уравнений дают зависимость между координатами трех точек. В уравнения  явно не входит, хотя явно не входит, хотя  являются функциями от . являются функциями от . |
| 4.2 | Нестационарные (реономные) | – это связи, зависящие явно от времени. | в уравнения в явном виде входит время. | 1. Рассмотрим подъемный кран, поднимающий груз . 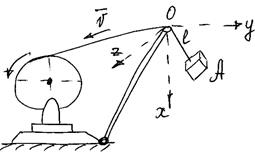 Трос – связь, зависящая от времени. При равномерном наматывании троса на барабан со скоростью Трос – связь, зависящая от времени. При равномерном наматывании троса на барабан со скоростью  длина свисающей части троса изменяется по закону длина свисающей части троса изменяется по закону  , где , где  – длина участка в начальный момент времени. Т.к. груз может раскачиваться, то уравнение этой связи имеет вид – длина участка в начальный момент времени. Т.к. груз может раскачиваться, то уравнение этой связи имеет вид  Уравнение содержит время в явном виде. Уравнение содержит время в явном виде. |
| | | | | | |
| № пп | Тип связи | Определение | Уравнение связи | Примеры |
| | | | | 2. Рассмотрим кривошипно–ползунный механизм. Допустим ползун кривошипно-ползунного механизма скользит по поверхности стола, который совершает гармонические колебания в вертикальном направлении:  . . 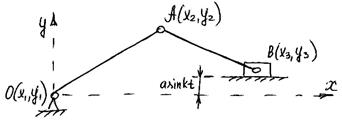 Уравнение связей получим, определяя произвольные положения трех точек механизма: Уравнение связей получим, определяя произвольные положения трех точек механизма:  Третье уравнение системы содержит время в явном виде. Третье уравнение системы содержит время в явном виде. |
| 5.1 | Голономные (интегрируемые) | – это связи, которые накладывают ограни-чения на положения точек механической системы. | в уравнения связей не входят скорости и ускорения точек системы. Вместе с тем будучи продифференцированы по времени, уравнения голономных связей представляют ограничения, накладываемые на скорости точек системы. Т.е. голономные связи могут описываться и дифференциальными уравнениями, однако последние обязательно должны быть интегрируемыми. | 1. См. примеры связей п. 3.1, п.3.2, п. 4.1 и п.4.2. 2. Рассмотрим колесо, катящееся по плоскости без скольжения. 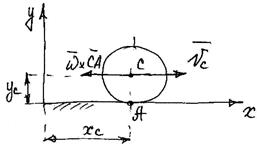 Т.к. колесо не отрывается от рельса и перекатывание происходит без скольжения, то ограничения, наложенные на движение колеса, можно записать в виде: Т.к. колесо не отрывается от рельса и перекатывание происходит без скольжения, то ограничения, наложенные на движение колеса, можно записать в виде:  (1) (1)  (2) (2) |
| | | | | | |
| № пп | Тип связи | Определение | Уравнение связи | Примеры |
| | | | | Т.к.  , то проектируя (2) на , то проектируя (2) на  , получим: , получим:  Это дифференциальное уравнение является интегрируемым и при интегрировании получаем при НУ: Это дифференциальное уравнение является интегрируемым и при интегрировании получаем при НУ:  , что , что  . Окончательно запишем уравнения связи в следующем виде: . Окончательно запишем уравнения связи в следующем виде:  Полученные уравнения не содержат производных от координат по времени. Полученные уравнения не содержат производных от координат по времени. |
| 5.2 | Неголономные (неинтегрируемые) | – это связи, которые накладывают ограничения на координаты и скорости точек системы. | уравнения содержат координаты точек системы, скорости этих точек и время и являются неинтегрируемыми дифференциальными уравнениями: Уравнения могут быть проинтегрированы лишь в совокупности с дифференциальными уравнениями движения механической системы. | Рассмотрим шар, катящийся без скольжения по шероховатой плоскости. Ограничения, наложенные на движение шара, можно записать в виде: 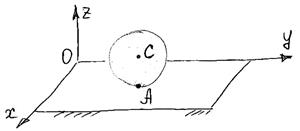  (1) (2) Т.к. (1) (2) Т.к.  , ,    , и согласно кинематическим уравнениям Эйлера: , и согласно кинематическим уравнениям Эйлера:    уравнение (2) запишем в следующем виде: уравнение (2) запишем в следующем виде:   . Проектируя последнее уравнение на оси координат, получим, что уравнения связи имеют след. вид . Проектируя последнее уравнение на оси координат, получим, что уравнения связи имеют след. вид |
| | | | |  | Получили дифференциальные уравнения, которые не интегрируются в общем виде. |
| | | | | | | |
| № пп | Тип связи | Определение | Примеры |
| 6.1 | Идеальные (совершенные) | | | |
| 6.2 | Неидеальные | | | |
| | | | | | |
 2015-06-24
2015-06-24 6513
6513
