 2015-06-05
2015-06-05 6161
6161Опоры аппаратов служат для установки аппаратов на фундаменты и несущие конструкции.
При установке вертикальных аппаратов на полу или на фундаментах применяют опорные лапы (стойки), при подвеске их между перекрытиями – боковые.
Для опирания горизонтальных аппаратов используют седловидные опоры, размещаемые снизу аппарата и охватывающие его не менее чем на 120° по окружности. Количество опор может быть 2, 3 и более, в зависимости от длины аппарата.
Выбор типа опоры зависит от ряда условий:
· места установки аппарата (в помещении или на открытой площадке)
· соотношение высоты к диаметру аппарата
· его массы и т.д.
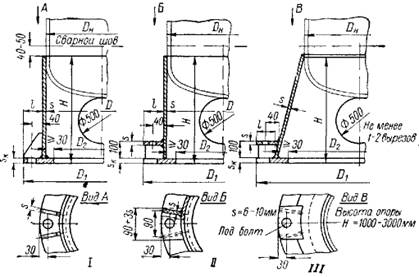
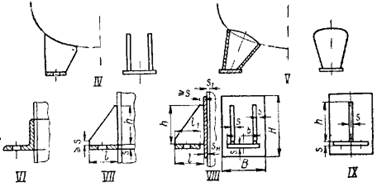
Рисунок 10.2.1 – Основные типовые конструкции опор для вертикальных аппаратов
Расчет
Первоначально выбираем количество и тип опор согласно массе аппарата.
Затем рассчитываем нагрузку на одну опору.
Рассчитаем обечайку на местную прочность и устойчивость в местах, где крепятся лапы:
Ребра привариваем к корпусу сплошным швом с катетом hш. Общая длинна сварного шва, Lш, м:
 ,
,
где Н – параметр выбранной опоры (см. таблицу 10.2.1)
s – толщина аппарата, м.
Проверим прочность сварных швов:

где G – нагрузка, воспринимаемая одной опорой, МН
 МН/м2
МН/м2
Если условие выполняется, то прочность сварного шва обеспечена.
Определим максимальные напряжения в корпусе аппарата в месте присоединения к нему лап.
Найдем параметры для нахождения коэффициентов Кк и Км
 ,
,  ,
,

 .
.
где В,Н – размеры опоры
D – диаметр аппарата, м
s – толщина стенки аппарата, м
Cк – прибавка на коррозию, м
Момент от реакции опоры Ми, МН·м, действующий на лапу при расчетном плече:
 ,
,
где  - определяем из чертежа опоры, м.
- определяем из чертежа опоры, м.
По графику на рисунке 10.3.1 определяем значение коэффициентов Кк и Км.
Далее определяем параметр β для нахождения моментов действующих на корпус:
для определения меридиональных моментов:
 ,
,
для определения кольцевых моментов:
 .
.
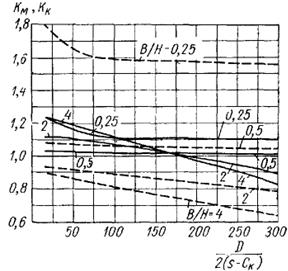
Рисунок 10.3.1 – Графики для определения коэффициента К
 Км ,--------- Кк
Км ,--------- Кк
По графику на рисунке 10.3.2 определяем параметр  , используя β1 и
, используя β1 и  .
.
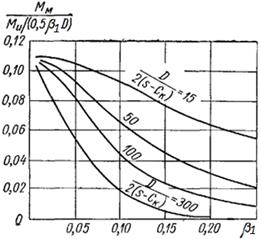
Рисунок 10.3.2 – Графики для определения, отнесенного к единице длины меридионального момента Мм, действующего на стенку цилиндрического корпуса аппарата в месте присоединения к нему лапы (опоры)
Отсюда определяем меридиональный момент Мм, МН×м/м.
По графику на рисунке 10.3.3 определяем параметр  , используя β2 и
, используя β2 и
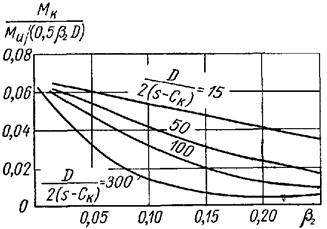
Рисунок 10.3.3 – Графики для определения, отнесенного к единице длины меридионального момента Мк, действующего на стенку цилиндрического корпуса аппарата в месте присоединения к нему лапы (опоры)
Отсюда определяем кольцевой момент Мк, МН×м/м.
Далее по графикам на рисунке 10.3.4 определяем коэффициенты К'к и К'м, для определения сил действующих на корпус.
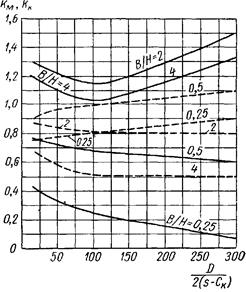
 Рисунок 10.3.4 – Графики для определения коэффициентов К' при определении расчетных сил Рм и Рк, действующих на стенку цилиндрического корпуса
Рисунок 10.3.4 – Графики для определения коэффициентов К' при определении расчетных сил Рм и Рк, действующих на стенку цилиндрического корпуса
Км ,--------- Кк
Определяем параметр β для определения сил действующих на корпус аппарата:
 .
.
По графику на рисунке 10.3.5 определяем параметр  , используя β3 и .
, используя β3 и .

Рисунок 10.3.5 – Графики для определения, отнесенного к единице длины меридиональной силы Рм, действующего на стенку цилиндрического корпуса аппарата в месте присоединения к нему лапы (опоры)
Отсюда определяем меридиональную силу Рм, МН/м.
По графику на рисунке 10.3.6 определяем параметр  , используя β3 и .
, используя β3 и .
Отсюда определяем кольцевую силу Рк, МН/м.
Суммарное напряжение сжатия σc, МН/м2, в корпусе аппарата при толщине стенки  , мм в месте присоединения лапы:
, мм в месте присоединения лапы:
в меридиональном направлении:
 ,
,
в кольцевом направлении:
 ,
,
Если оба напряжения меньше допускаемого, следовательно, лапа может быть приварена к обечайке без подкладного листа. В противном случае используется подкладной лист. Толщина стенки в этом случае рассчитывается по формуле sп = s + s1 – cк и весь расчет производить заново.
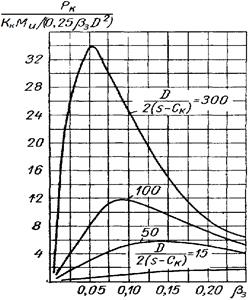
Рисунок 10.3.6 – Графики для определения, отнесенного к единице длины кольцевой силы Рк, действующего на стенку цилиндрического корпуса аппарата в месте присоединения к нему лапы (опоры)

