 2015-07-21
2015-07-21 2217
2217Использование Control System Toolbox
Для анализа и синтеза САУ
Конспект лекций по курсу
"Программные средства для анализа и синтеза САУ"
Самара 2005
Составитель: Рогачев Г.Н.
УДК 62-50
Использование Control System Toolbox для анализа и синтеза САУ. Конспект лекций по курсу "Программные средства для анализа и синтеза САУ " / Cамар. гос. техн. ун-т; Сост.Рогачев Г.Н.Самара, 2005. 28 с.
Пособие призвано облегчить изучение дисциплины "Программные средства для анализа и синтеза САУ".
Методические указания предназначены для студентов специальностей 22.01.01 - Управление и информатика в технических системах и 22.03.01 - Автоматизация технологических процессов и производств (компьютерные системы управления в производстве и бизнесе).
Печатается по решению редакционно-издательского Совета СамГТУ
Использование Control System Toolbox для анализа и синтеза САУ
Динамические и частотные характеристики систем автоматического управления. Получение характеристик САУ.
В качестве объекта исследования выступают линейные (линеаризованные) динамические стационарные системы управления с одним входом и одним выходом. При этом модель одномерной САУ задана в виде комплексной передаточной функции, записанной как отношение полиномов
 .
.
Необходимо:
1. Определить полюса и нули передаточной функции
 ,
,  .
.
2. Построить графики переходной и импульсно-переходной функции:
h (t), w (t).
3. Построить логарифмические частотные характеристики
L (w).
4. Построить частотный годограф Найквиста
W (iw), w = [0,  ].
].
Для решения задачи используется пакет прикладных программ (ППП) Control System Toolbox системы инженерных расчетов MATLAB. ППП предназначен для работы с LTI-моделями (Linear Time Invariant Models) систем управления.
В Control System Toolbox имеется тип данных, определяющих динамическую систему в виде комплексной передаточной функции. Синтаксис команды, создающий LTI-систему c одним входом и одним выходом, в виде передаточной функции:
TF([bm, …, b1, b0], [an, …, a1, a0]),
bm, …, b1– значения коэффициентов полинома В в (3),
an, …, a1– значения коэффициентов полинома A в (3).
Таблица 1. Некоторые команды Control System Toolbox
| Синтаксис | Описание |
| pole(<LTI-объект>) | Вычисление полюсов передаточной функции |
| zero(<LTI-объект>) | Вычисление нулей передаточной функции |
| step(<LTI-объект>) | Построение графика переходного процесса |
| impulse(<LTI-объект>) | Построение графика импульсной переходной функции |
| bode(<LTI-объект>) | Построение логарифмических частотных характеристик (диаграммы Боде) |
| nyquist(<LTI-объект>) | Построение частотного годографа Найквиста |
Для определения корней полиномов степени k может также применяться команда MATLAB
roots(P),
которая в качестве аргумента P получает матрицу коэффициентов полинома [ pk, …, p 0].
Другим вариантом получения графиков динамических характеристик САУ является использование графического интерфейса ППП CST – LTI viewer, вызов которого осуществляется командой
ltiviewer,
которой в качестве параметра можно указать имя переменной, содержащей LTI-объект.
Пример
Пусть задана передаточная функция САУ
 .
.
Найдем ее динамические и частотные характеристики с использованием ППП Control System Toolbox системы MATLAB. Будем работать в командном режиме.
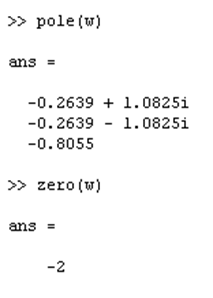
1. Создадим LTI-объект с именем w, для этого выполним:

2. Найдем полюса и нули передаточной функции с использованием команд pole, zero.
3. Построим переходную функцию командой step(w). Результат ее выполнения приведен на рис. 1.
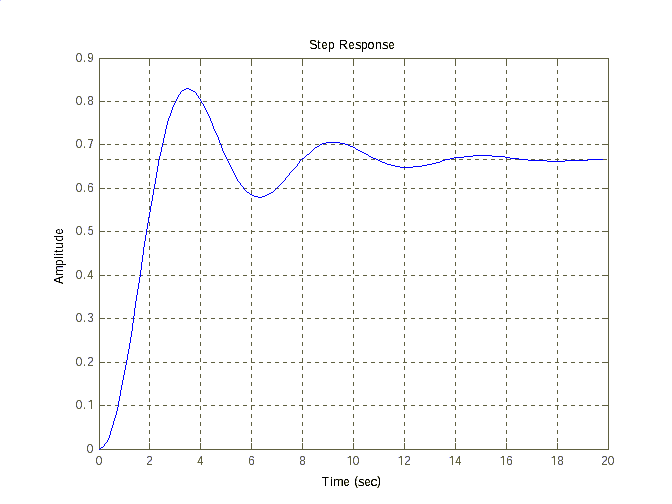
Рис.1. Переходная функция h(t)
4. Построим импульсную переходную функцию командой impulse(w). Результат показан на рис. 2.
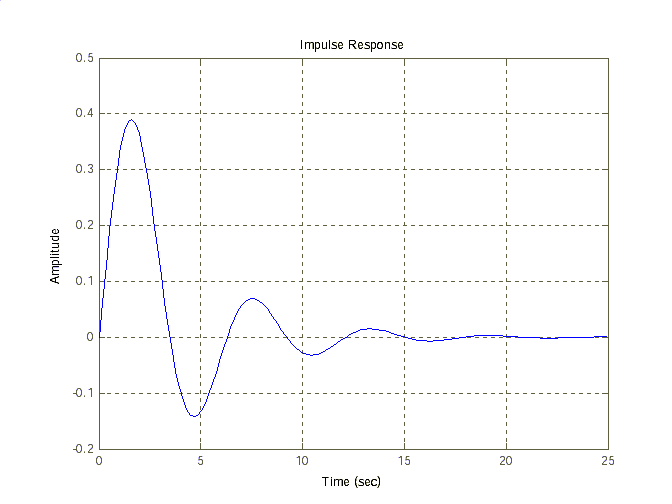
Рис 2. Импульсная переходная функция
5. Диаграмму Боде получим, используя команду bode(w) – рис. 3.
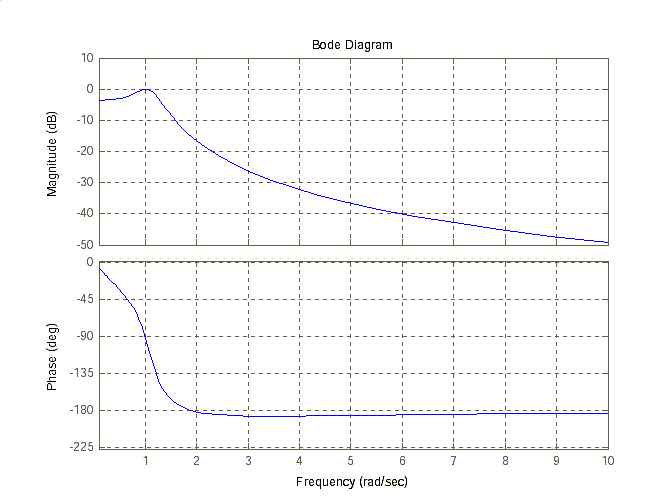
Рис. 3. Логарифмические частотные характеристики
6. Определим частотный годограф Найквиста, выполнив команду nyuivist(w) – рис. 4.
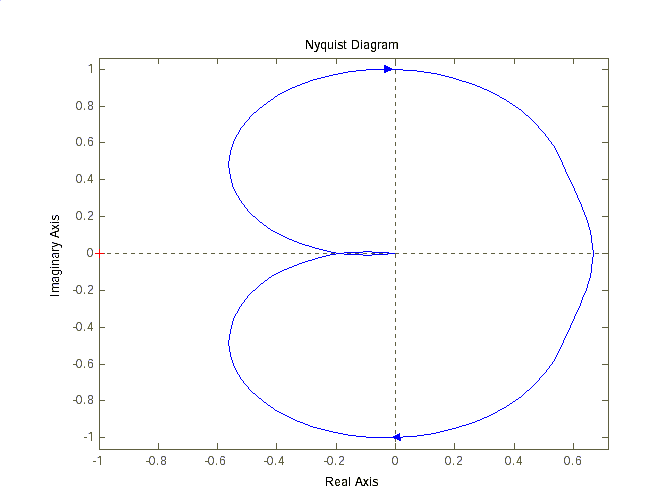
Рис. 4. Частотный годограф
Аналогичные результаты (рис. 5) можно получить, используя команду ltiviewer(w), с соответствующими настройками в меню “Plot Configuration".
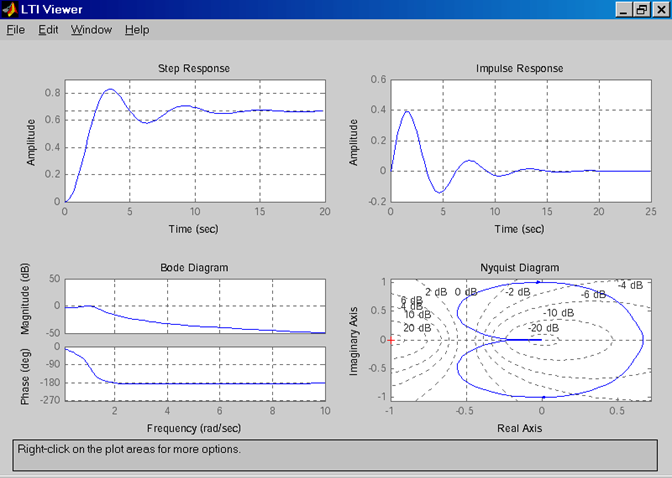
Рис. 5. LTI-viewer
2. Анализ и синтез САУ методом корневого годографа.
В ряде случаев, имеющих практическое значение, модель линейной системы автоматического управления (САУ) задается в виде структурной схемы, состоящей из типовых звеньев, математическое описание которых задано в операторной форме. Связь между входом и выходом системы задается в виде передаточной функции W (s). B общем виде передаточную функцию W (s) можно представить в виде:
 (1)
(1)
где s – комплексная переменная, B (s) – полином степени m; A (s) – полином степени n.
Для физически реализуемых САУ m <= n. Коэффициенты указанных полиномов действительные числа.
Применение метода корневого годографа (КГ) обусловлено фундаментальной зависимостью поведения линейной САУ от полюсов и нулей ее передаточной функции. Под полюсами подразумеваются корни полинома - знаменателя A (s), а под нулями - корни полинома числителя B (s). Полином A (s) называется также характеристическим многочленом передаточной функции W (s).
Положение полюсов W (s) на комплексной плоскости определяет устойчивость САУ, а в совокупности с нулями вид импульсной переходной функции w (t) и переходной функции h (t).
Метод корневого годографа позволяет находить полюса и нули передаточной функции замкнутой системы, располагая полюсами и нулями разомкнутой системы при изменении коэффициента усиления разомкнутой системы k.
Передаточную функцию разомкнутой системы Wp (s) представим в виде:
 , (2)
, (2)
где  – нули передаточной функции Wp (s), (
– нули передаточной функции Wp (s), ( );
);  – полюса передаточной функции Wp (s), (
– полюса передаточной функции Wp (s), ( ), n и m – порядки знаменателя и числителя; K - коэффициент усиления разомкнутой системы; C - коэффициент представления.
), n и m – порядки знаменателя и числителя; K - коэффициент усиления разомкнутой системы; C - коэффициент представления.
Передаточная функция разомкнутой системы, как правило, задается в виде отношения произведений передаточных функций стандартных (типовых) звеньев, при описании которых используются выражения трех видов:
Ts (3)
Ts +1 (4)
T 2 s 2 + 2 T z s + 1 (5)
Здесь Т - постоянная времени [с].
Если выражения (3), (4), (5) стоят в знаменателе передаточных функций звеньев (в числителе 1), то звенья называются соответственно интегрирующим, апериодическим, колебательным. Для колебательного звена z - безразмерный коэффициент затухания (0< z <1). Если выражения (3), (4), (5) стоят в числителе передаточных функций звеньев (1), то звенья называются соответственно дифференцирующим, форсирующим первого порядка, форсирующим второго порядка.
Для перехода от стандартной формы записи к формуле (2) необходимо вычислить полюса и нули соответствующих типовых звеньев.
Для передаточных функций, использующих выражение (3) –
 , (6)
, (6)
использующих выражение (4) –
 , (7)
, (7)
использующих выражение (5) –
 , (8)
, (8)
или
 (9)
(9)
где j = arcsin z.
Коэффициент представления C вычисляется по формуле
 (10)
(10)
Для звеньев, использующих выражение (5), соответствующая постоянная времени входит в выражение (10) в квадрате.
При замыкании системы с передаточной функцией W p(s) единичной обратной связью передаточная функция замкнутой системы Wз (s) принимает вид:
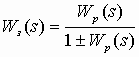 , (11)
, (11)
где знак "+" соответствует отрицательной обратной связи; знак "–" соответствует положительной обратной связи.
Структурная схема системы с обратной связью приведена на рис. 6.
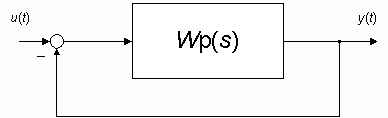
Рис. 6. Структурная схема САУ
Из (11) следует, что нули передаточной функции замкнутой системы равны нулям передаточной функции разомкнутой системы.
Для определения полюсов замкнутой системы необходимо решить уравнение:
Wp (s) = – 1. (12)
Так как Wp (s) является функцией комплексного переменного s, то уравнение (12) распадается на два уравнения:
– уравнение модулей:
| W (s)|=1 (13)
– уравнение аргументов:
arg W(s) = ± (2u +1)p, u =0, 1, 2, … (14а)
для отрицательной обратной связи и
arg W (s) = ± 2p, u =0, 1, 2, … (14б)
для положительной обратной связи.
Уравнения (14) имеют наглядный геометрический смысл. Если точка s является полюсом замкнутой системы, то проведя в точку s вектора из всех нулей Wp (s) (обозначим аргументы этих векторов  ) и вектора из всех полюсов Wp (s) (обозначим аргументы этих векторов
) и вектора из всех полюсов Wp (s) (обозначим аргументы этих векторов  ), уравнение (14а) можно записать в следующем виде:
), уравнение (14а) можно записать в следующем виде:
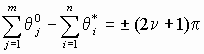 , u = 0, 1, 2, … (15a)
, u = 0, 1, 2, … (15a)
а уравнение (14б) в виде:
 , u = 0, 1, 2, … (15б)
, u = 0, 1, 2, … (15б)
Углы q отсчитываются от положительного направления действительной оси. Знак угла "+" соответствует повороту против часовой стрелки, знак угла "–" соответствует повороту по часовой стрелке.
Геометрическое место точек на комплексной плоскости “s”, удовлетворяющее выражениям (15а) и (15б) называетсякорневым годографом.
Как следует из (15), конфигурация корневого годографа не зависит от коэффициента усиления K, но каждому конкретному значению K однозначно соответствуют точки на корневом годографе.
Для определения этого соответствия достаточно воспользоваться уравнением (13) в следующей интерпретации:
 ,(16)
,(16)
где  – модуль (длина) вектора, проведенного из j -нуля в точку s КГ;
– модуль (длина) вектора, проведенного из j -нуля в точку s КГ;  – модуль вектора, проведенного из i -полюса в ту же точку s.
– модуль вектора, проведенного из i -полюса в ту же точку s.
Для систем небольшого порядка m, n < 5 - 7 построение КГ можно осуществлять “вручную” (с помощью транспортира и линейки).
Приведем свойства корневых годографов(случай отрицательной обратной связи):
1. Ветви корневого годографа непрерывны и расположены на комплексной плоскости симметрично относительно действительной оси.
2. Число ветвей КГ равно порядку системы n. Ветви начинаются в n полюсах разомкнутой системы при K = 0. При возрастании K от 0 до бесконечности полюса замкнутой системы двигаются по ветвям КГ.
3. Отрезки действительной оси, по которым перемещаются действительные полюса замкнутой системы являются действительными ветвями корневого годографа. Эти ветви находятся в тех частях действительной оси, справа от которых расположено нечетное общее число действительных полюсов и нулей разомкнутой системы.
4. m ветвей КГ при возрастании K от 0 до бесконечности заканчиваются в m нулях Wp (s), a (n – m) ветвей при K, стремящемся к бесконечности, удаляются от полюсов вдоль асимптот.
5. Асимптоты в виде звезды из (n – m) полупрямых выходят из точки с координатой
на действительной оси под углами

к действительной оси.
6. Угол выхода ветви КГ из полюса определяется из уравнения (15а), примененного к данному полюсу. Аналогично определяется угол входа ветви КГ в нуль  .
.
7. При расположении ветвей корневого годографа в левой полуплоскости s САУ устойчива. При пересечении ветвей КГ мнимой оси слева направо САУ становится неустойчивой. Пусть при K = K кр пересечение КГ с мнимой осью произойдет в некоторой точке iw кр. Назовем это значение коэффициента усиления критическим K кр, а величину w кр критической угловой частотой, на которой система становится неустойчивой.
Метод КГ позволяет выбрать коэффициент усиления САУ, подобрать расположение полюсов и нулей передаточной функции корректирующих звеньев, определить параметры доминирующих полюсов САУ (ближайших к началу координат плоскости s).
В качестве примеров, приведем КГ для двух систем автоматического управления.
На рисунке 7 а приведен корневой годограф САУ, передаточная функция разомкнутой системы, которой равна:
 .
.
Рисунок 7 б иллюстрирует КГ САУ с передаточной функцией разомкнутой системы вида:
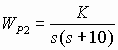 .
.
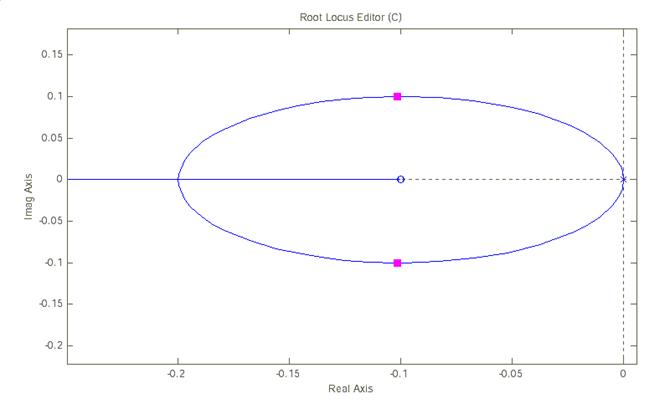
а)
б)
Рис. 7. Примеры корневых годографов
Далее рассмотрим способ построения корневых годографов. Дана модель разомкнутой системы, записанная в виде отношения произведений типовых звеньев. Необходимо:
1. Построить корневой годограф.
2. Получить коэффициент усиления K кр, при котором система находится на границе устойчивости.
3. Вычислить частоту w кр, при которой в системе возникают незатухающие колебания.
Для решения задачи используется GUI-интерфейс “SISO Design Tool” из пакета прикладных программ Control System Toolbox системы инженерных расчетов MATLAB.
Графический интерфейс предназначен для анализа и синтеза одномерных линейных (линеаризованных) систем автоматического управления (SISO - Single Input/Single Output).
В Control System Toolbox имеется тип данных, определяющих динамическую систему в виде набора полюсов, нулей и коэффициента усиления передаточной функции. Синтаксис команды, создающий LTI (Linear Time Invariant)-систему в виде объекта ZPK (zero-pole-gain) c одним входом и одним выходом
ZPK([  ], [
], [  ], K)
], K)
– значения нулей системы, – значения полюсов системы, K – коэффициент усиления.
Более естественным является вариант, при котором с помощью функции ZPK создается символьная переменная 's', которая затем используется для определения передаточной функции в виде отношения (2). Например, после выполнения команд
s = zpk('s'); W1 = (s+0.1)/(s^2)
произойдет создание переменной W1 типа ZPK, определяющей передаточную функцию вида  .
.
Запуск графического интерфейса SISO Design Tool осуществляется командой
sisotool
или выбором соответствующего пункта в окне “Launch Pad".
Необходимо выбрать в меню View пункт Root Locus (корневой годограф), для отображения редактора Root Locus Editor. В правом верхнем углу SISO Design Tool можно менять тип обратной связи (кнопка '+/–') и структурную схему САУ. Предполагается наличие отрицательной обратной связи, и структурной схемы, показанной на рис.2.1.
Для загрузки данных из рабочего пространства MATLAB необходимо использовать меню “File/Import”, в результате чего появляется диалог Import System Data. Необходимо, чтобы в результате импортирования данных получилась рассматриваемая схема САУ (рис.2.1). Изменение динамических и частотных характеристик замкнутой системы при изменении К можно проследить используя меню "Tools/Loop Responses".
Пример
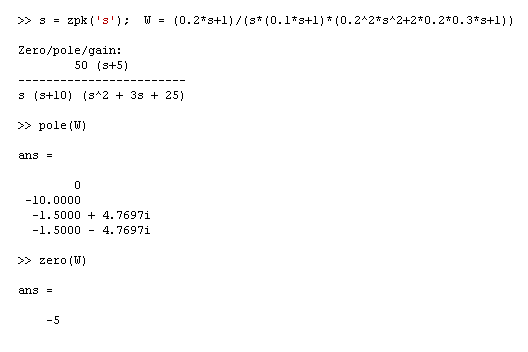
Пусть необходимо исследовать САУ с передаточной функцией разомкнутой системы:
 .
.
1. Создадим ZPK-объект, найдем полюса и нули разомкнутой системы:
2. Запустим SISO-Design Tool, настроим параметры и импортируем ZPK-объект из рабочего пространства MATLAB (рис.8). В окне Root Locus Editor интерфейса SISO-Design Tool построится корневой годограф (рис. 9).
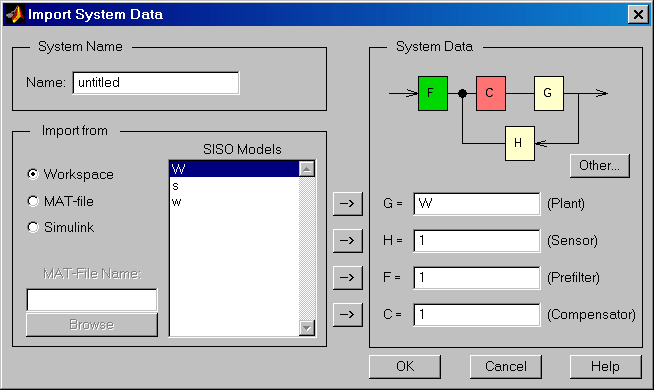
Рис. 8. Диалог импортирования данных в SISO-Design Tool
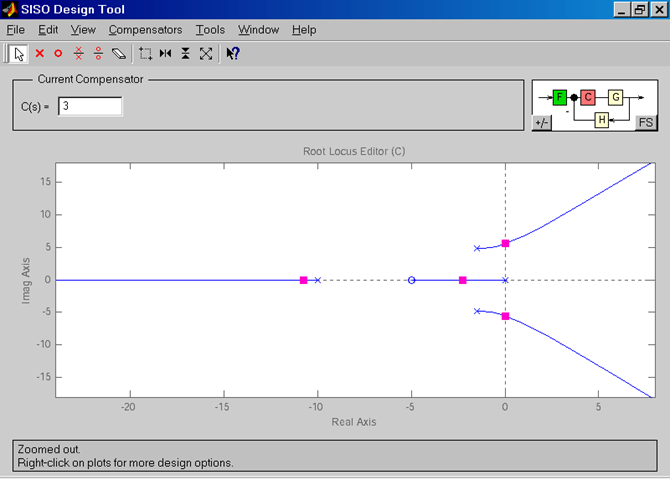
Рис 9. SISO-Design Tool
3. Двигая красным курсором по корневому годографу до пересечения ветвей с мнимой осью, определить значение K кр (рис. 10). В данном случае K кр» 3. Значение w кр соответствует мнимой координате пересечения КГ мнимой оси. Просмотреть это значение можно в нижней части интерфейса или выбрав меню "View/Closed-Loop Poles" (рис. 11).
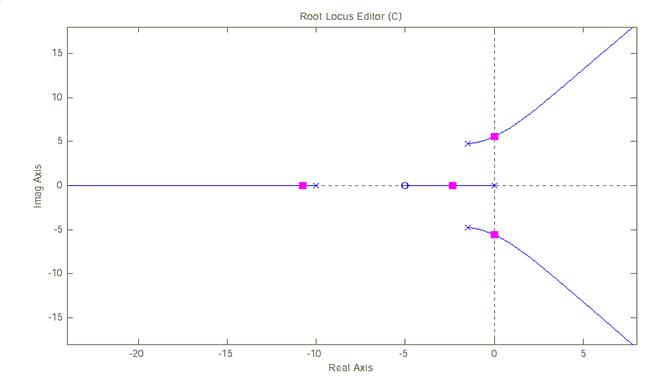
Рис. 10. Корневой годограф с нанесенным значением K кр
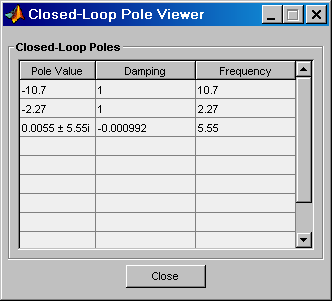
Рис. 11. Closed-Loop Poles Viewer
3. Описание динамических систем в пространстве состояний
Даны математические модели трех систем и структурная схема, представляющая собой соединение этих систем. Необходимо:
· получить модель результирующей системы в пространстве состояний,
· исследовать наблюдаемость и управляемость трех подсистем в отдельности, и общей системы.
Многомерные системы, в отличие от одномерных имеют несколько входов и несколько выходов.
Для описания таких систем используются три набора параметров (три вектора), см. рис.12:
1. вектор входных воздействий (управлений);
2. вектор переменных состояний;
3. вектор выходных параметров
и два преобразования:
1. Преобразование “входы-состояния”
2. Преобразование “состояния-выходы”.
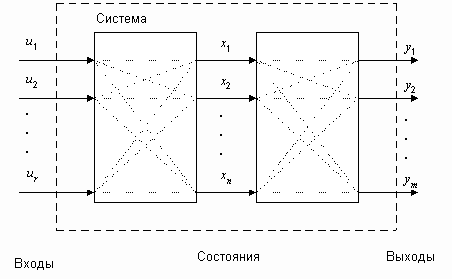
Рис. 12. Многомерные системы
Широкое распространение, обусловленное разработанным математическим аппаратом, получили линейные модели многомерных систем в пространстве состояний, которые имеют вид:
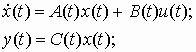 (1)
(1)
первое соотношение называется уравнением состояния, второе – уравнением выхода. Здесь x = (x 1, x 2, …, xn)T I Rn – вектор переменных состояний; u = (u 1, u 2, …, ur)T I U I Rn – вектор управлений; y = (y 1, y 2, …, ym)T I Rn – вектор измеряемых параметров; t – время; A (t), B (t), C (t) – матрицы размерности (nХn), (nХr), (mХn) соответственно. Предполагается, что известны начальные состояния x (t 0) = x 0, где t 0 – начальный момент времени.
Если матрицы A (t), B (t), C (t) не зависят от времени t, то система называется стационарной. В пакете предполагается, что системы стационарны.
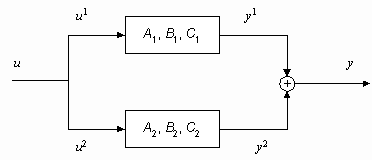
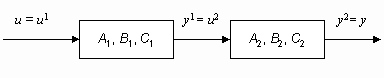
Рассмотрим задачи соединения двух подсистем в систему. При соединении возможны три варианта (рис. 13): параллельное (а), последовательное (б) и в обратной связи (в). Предполагается, что обе системы описываются в пространстве состояний соотношениями:
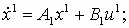 y 1 = C x 1;
y 1 = C x 1;
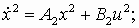 y 2 = C x 2;
y 2 = C x 2;
где x 1, u 1, y 1 – векторы состояний, управлений, выходов первой системы, x 2, u 2, y 2 – второй. Необходимо по известным матрицам A 1, B 1, C 1, A 2, B 2, C 2 получить матрицы A, B, C (рис. 2. г).
a)
б)
в)
г)
Рис. 13. Соединение двух систем

