 2015-07-21
2015-07-21 2651
2651В большинстве эксплуатируемых в настоящее время РЛС применяются импульсные методы измерения дальности, т.к. они позволяют просто и эффективно решить проблему разделения зондирующего и отраженного от цели сигналов.
Структурная схема РЛС с импульсным методом измерения дальности показана на рис.6.2.
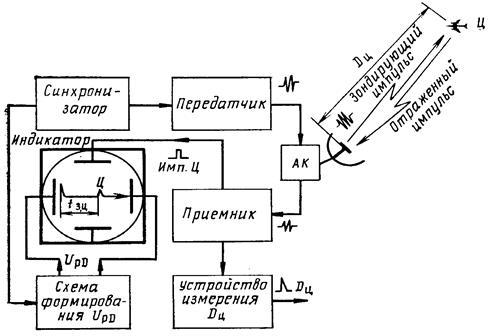
Рис.6.2. Структурная схема РЛС
с импульсным методом измерения дальности.
Работой РЛС управляет синхронизатор, который обеспечивает заданную последовательность работы передатчика, приемника, антенного коммутатора (АК) и индикатора станции. Начало развертки индикатора должно строго соответствовать моменту излучения зондирующего импульса.
Под действием напряжения развертки UpD, поданного на горизонтально отклоняющие пластины ЭЛТ, электронный луч вычерчивает на экране развертку дальности. Тогда величина отклонения луча lo и измеряемая дальность до цели D связаны соотношением:
lo = VD tD = VD 2D/c,
где: VD – скорость развертки по дальности;
tD – время запаздывания отраженного от цели сигнала
относительно зондирующего сигнала.
Следовательно, если откалибровать развертку индикатора в единицах измерения дальности, то можно непосредственно по экрану ЭЛТ отсчитывать дальность до цели. Однако при такой технической реализации импульсный метод определения дальности имеет низкую точность измерений.
Для повышения точности измерений дальности отраженный сигнал совмещают с каким-либо опорным элементом (электронной меткой, стробом и т.д.), временная задержка которого относительно момента излучения зондирующего сигнала является известной величиной.

