 2015-08-21
2015-08-21 3740
3740При несоответствии действительных значений девиации табличным значениям более допустимых величин (δ > 2°), необходимо предварительно уничтожить девиацию (как правило, полукруговую). При этом предполагается, что технически курсоуказатели исправны.
Среди способов уничтожения полукруговой девиации наиболее известны способ Эри, метод Колонга и метод уничтожения полукруговой девиации на двух главных обратных обратных курсах.
Наиболее просто уничтожить девиацию можно способом Эри, используя гирокомпас для приведения судна на магнитные курсы N, S, E, W, а также для удержания судна на этих курсах во время выполнения процедуры уничтожения девиации. Также преимуществом способа является то,что в отличии от двух других способов для его выполнения не нужен дефлектор.
Расчет гирокомпасных курсов, соответствующих заданным магнитным курсам, производится по известной схеме:
ИК = ГКК + ΔГК, ИК = МК + d, ГКК = МК + (d – ΔГК).
После уничтожения производится определение остаточной девиации на восьми главных и четвертных курсах, судно поочередно направляют на компасные курсы N, NE, E, SE, S, SW, W, NW. В этом случае рулевому подаётся команда: «Лечь на компасный курс … по магнитному компасу». К процедуре определения девиации приступают не ранее чем через 3 минуты после выхода судна на курс, необходимых для перемагничивания «мягкого» судового железа. На каждом компасном курсе в момент нахождения соответствующего румба картушки магнитного компаса напротив курсовой
черты считывают или ОКП створа, если работают на девиационном
полигоне, или показания с репитера гирокомпаса. Затем производят
расчет девиации по формуле, представленной ниже, при работе на полигоне или по сличению с гирокомпасом:
δ = ОМП – ОКП.
Чтобы повысить точность девиационных работ и, как следствие, точность определения девиации магнитного компаса при работе на полигоне или по сличению с гирокомпасом, необходимо измерять несколько величин ОКП или отсчетов по гирокомпасу в моменты нахождения судна на заданных ККГЛ. Затем полученные значения усредняют, а промахи отбрасывают. При девиационных работах рекомендуется маневрировать на малых ходах и избегать поворотов на большое число градусов, так как точность определения девиации зависит от стабильности поправки гирокомпаса. Практика работы с гирокомпасом показывает, что его поправка не является постоянной, а изменяется при маневрировании судна в зависимости от скорости и величины угла поворота. При определённом сочетании этих элементов маневрирования возможны весьма значительные изменения поправки гирокомпаса. Если позволяет навигационная обстановка, то на момент сличения необходимо определить ΔГК.
Вычисление наблюдений девиации на 8 компасных курсах (до 0,10)
при выполнении курсовой работы d = 5,00 E
| ПО ПЕЛЕНГАМ | ПО СЛИЧЕНИЮ | ПО ПЕЛЕНГАМ | ПО СЛИЧЕНИЮ | ||||||||||||||
| КК в момент пеленгования | МП или ОМП | КП или ОКП | d | ККгл или ГКК | d гл или DГК | МК | КК | d | КК в момент пеленгования | МП или ОМП | КП или ОКП | d | ККгл или ГКК | d гл или DГК | МК | КК | d |
| N | 2,1 | +0,7 | -2,2 | S | 184,9 | +0,7 | +0,6 | ||||||||||
| NE | 50,1 | +0,7 | +0,8 | SW | 229,7 | +0,7 | +0,4 | ||||||||||
| E | 96,6 | +0,7 | +2,3 | W | 273,2 | +0,7 | -1,1 | ||||||||||
| SE | 140,7 | +0,7 | +1,4 | NW | 316,3 | +0,7 | -3,0 |
Примечание: в таблице для расчета девиации использовалась формула
d = (ГКК + DГК) – (КК + d), DГК = +0,7°
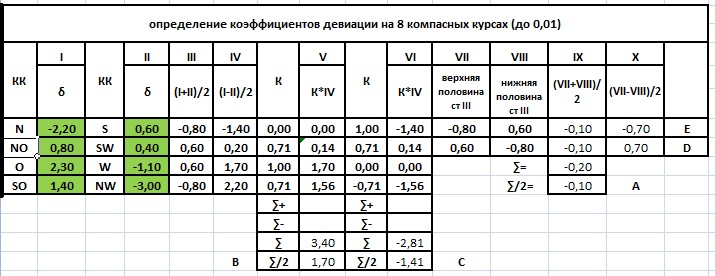
Вычисление коэффициентов по девиациям, наблюдённым на 8 компасных
курсах (до 0,010)
Вычисление таблицы девиации на компасные курсы через 150 (до 0,10)

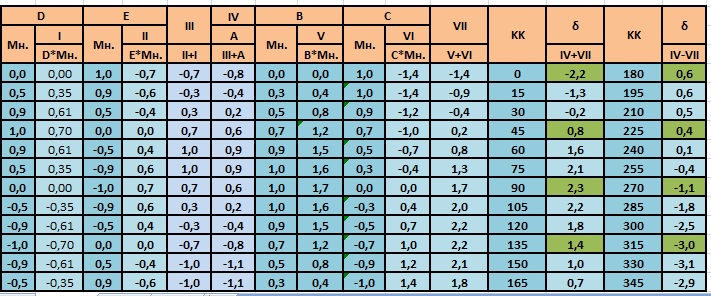
Таблица девиации магнитного компаса.
| КК | δ | КК | δ |
| N 0° | -2,2 | S 180° | +0,6 |
| 15° | -1,3 | 195° | +0,6 |
| 30° | -0,2 | 210° | +0,5 |
| 45° | +0,8 | 225° | +0,4 |
| 60° | +1,6 | 240° | +0,1 |
| 75° | +2,1 | 255° | -0,4 |
| E 90° | +2,3 | W 270° | -1,1 |
| 105° | +2,2 | 285° | -1,8 |
| 120° | +1,8 | 300° | -2,5 |
| 135° | +1,4 | 315° | -3,0 |
| 150° | +1,0 | 330° | -3,1 |
| 165° | +0,7 | 345° | -2,9 |
Коэффициенты
А = -0,10°
B = +1,70° C = -1,41° D = +0,70° E = -0,70°
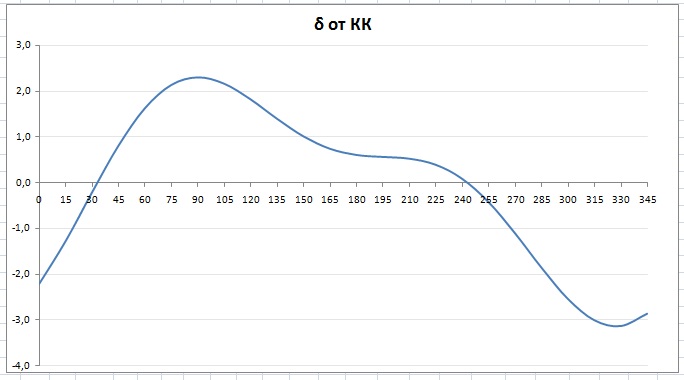
График девиации магнитного компаса.
Контроль таблицы девиации на главных и четвертных компасных румбах.
N: |δвыч – δнаб| = |-2.2+2.2| = 0 < 0,2°
NE: |δвыч – δнаб| = |0.8-0.8| = 0 < 0,2°
E: |δвыч – δнаб| = |2.3-2.3| = 0 < 0,2°
SE: |δвыч – δнаб| = |1.4-1.4| = 0 < 0,2°
S: |δвыч – δнаб| = |0.6-0.6| = 0 < 0,2°
SW: |δвыч – δнаб| = |0.4-0.4| = 0 < 0,2°
W: |δвыч – δнаб| = |-1.1+1.1| = 0 < 0,2°
NW: |δвыч – δнаб| = |-3.0+3.0| = 0 < 0,2°
Вывод: в соответствии с требованиями правил Регистра РФ значения остаточной девиации не должны превышать ± 3° для основного магнитного компаса, Если превышают то они могут быть обусловлены несинхронностью снятия показаний с главного магнитного и гирокомпасов, неточностью средств коррекции девиации, изменением поправки гирокомпаса на различных курсах,невыполнением рекомендаций касательно начала определения девиации (т.е. сличения компасов) через 3 минуты после выхода на курс (для перемагничивания мягкого железа), невыполнением основных проверок магнитного компаса (таких как проверка картушки на «застой», выверка призмы пеленгатора и т.д.), неточностью работы и возможными ошибками самого оператора компаса.
Таким образом, так как полученные требования не удовлетворяют требованиям Регистра, то есть необходимость повторно проводить компенсацию девиации.

