 2015-10-14
2015-10-14 3523
3523Пусть пространственная система сия приведена к центру О, т.е.
где 
Главный момент образует с направлением главного вектора некоторый угол а (рис 1.32)
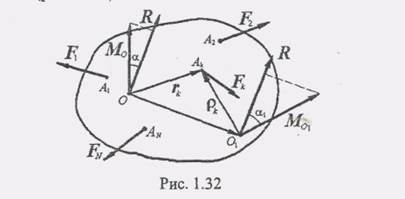
Возьмем теперь новый центр приведения О1 и приведем все силы к этому центру. В результате снова получим главный вектор, равный главному вектору R, и новый главный момент, определяемый формулой

где pк — радиус-вектор точки приложения силы Fk, проведенный из нового центра приведения О1 (см. рис. 1.32).
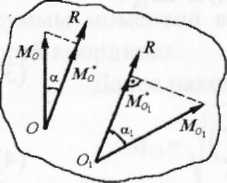
Главный момент Мо1 относительно нового центра приведения
изменился и теперь образует с направлением главного вектора R некоторый угол а1. Установим связь между моментами Мо и Мо1.
Из рисунка 1.32 видно, что

(3) Подставляя (3) в равенство (2), получим
 (4)
(4)
Далее, раскрывая скобки в правой части равенства (4) и вынося общий множитель О1О за знак суммы, имеем
Первая сумма в равенстве (5) равна М0, вторая - R, тогда
М01 = M0+O1O*R (6)
Второе слагаемое равно моменту главного вектора R относительно нового центра приведения в предположении, что главный вектор приложен в старом центре О, т.е.
|
|
|
O1O*R=mO1(R0).
Таким образом, мы доказали следующую теорему:
М01= M0+m01(R0).
Главный момент системы сил относительно нового центра приведения O1 равен сумме главного момента относительно старого центра приведения О и момента главного вектора относительно нового центра в предположении, что он приложен в старом центре О.
Следствие 1. Если главный вектор данной системы сил равен нулю, то главный момент не зависит от выбора центра приведения,
Следствие 2. Если главный вектор равен нулю и существует точка, относительно которой главный момент равен нулю, то главный момент будет равен нулю относительно любого другого центра приведения.
Следствие 3. Главный момент данной системы сил одинаков для всех точек прямой, параллельной главному вектору.
Вопрос №20. Дайте определение первого инварианта произвольной пространственной системы сил и докажите что является вторым инвариантом, как его аналитически вычислить и каков его геометрический смысл?
Величины, которые не изменяются при каком-либо преобразовании, называются инвариантными по отношению к этому преобразованию. Рассмотрим систему сил (F1, F2,…, FN) и приведем эту систему к заданному центру О. В результате получим
|
Очевидно, что величина и направление главного вектора по определению не зависят от выбора центра приведения. Поэтому его называют первым инвариантом произвольной пространственной системы сил. В более узком смысле под первым инвариантом произвольной пространственной системы сил будем понимать независимость квадрата модуля главного вектора от выбора центра приведения:
|
|
|
I1=R +R +R (2)
Что касается главного момента, то его модуль и направление изменяются с изменением центра приведения. Известно, что М01 =M0+O1OхR. (3)
Умножим это равенство скалярно на R: М01 * R = М0 R + (O1OхR)* R. (4)
Второе слагаемое правой части равенства (4) равно нулю как смешанное произведение коллинеарных векторов.
Поэтому M01*R = M0*R, (5)
т.е. скалярное произведение главного момента произвольной пространственной системы сил на главный вектор той же системы не зависит от выбора центра приведения и является вторым инвариантом I2 = М0 * R, (6)
или, в проекциях на оси декартовой системы координат, I2=MxRx+MyRy+MzRz. (7)
Второму инварианту можно дать очень простую геометрическую интерпретацию. На основании определения скалярного произведения I2=M0*R=M0Rcos(Mo,^ R). (8)
Откуда M0cos(Mo,^R)= I2/корень(I1) (9)
Таким образом, при R =/= 0 проекция главного момента на направление главного вектора не зависит от выбора центра приведения.

