 2014-01-31
2014-01-31 2036
2036Объекты управления являются теми основными элементами системы управления и регулирования, в которых при помощи технических средств автоматики должен осуществляться заданный или предписанный алгоритм функционирования. Объектом управления может быть машина, набор машин или сооружение, которые предназначены для выполнения технологического процесса, целью которого является получение определенной продукции или энергии. В состав объекта управления может также входить внешняя среда, если она оказывает существенное влияние на состояние объекта. Особенность объекта управления заключается в том, что в нем происходит преобразование, передача или накопление энергии или вещества.
Подведенная из вне энергия или вещество изменяют состояние объекта, которое прежде всего характеризуется изменением его параметров.
Для изменения подводимой энергии или вещества к объекту, последний обязательно имеет регулирующий орган.
Объект можно считать управляемым, если он характеризуется следующими признаками:
а) в нем происходит преобразование, передача или накопление энергии или вещества;
б) если он имеет регулирующий орган для изменения потока энергии или вещества;
в) приток энергии или вещества изменяет состояние объекта, которое характеризуется изменением одного или нескольких параметров, определяющих алгоритм функционирования и составляющих цепь управления.
Воздействие на объект управления может осуществляться как на стороне поступления энергии или вещества, так и на выходе их из объекта. Обычно воздействие на объект управления определяют как управляющим или как возмущающим.
Параметры объекта управления обычно характеризуют качество управления и их называют переменными управления или выходными величинами управляющего объекта.
Объект управления характеризуется определенными свойствами, которые влияют на работоспособность объекта и качества протекающих в цепи процессов.
К основным свойствам объекта управления относят самовыравнивание, запаздывание и аккумулирующую способность.
Под самовыравниванием понимают способность объекта самостоятельно приходить в новое состояние равновесия при изменении управляющего или возмущающего воздействия. Свойством самовыравнивания обладают не все объекты управления. Объекты управления которые описываются интегральными или интегрирующими звеньями не обладают самовыравниванием. Такие объекты называются астатическими, а обладающие самовыравниванием – статические.
Объекты без самовыравнивания очень трудно поддаются управлению. Самовыравнивание может быть положительным и отрицательным. В первом случае равновесие восстанавливается без участия регулятора. В случае отрицательного самовыравнивания, восстановление равновесия осуществляется только при участии регулятора. Это объясняется тем, что возникшее нарушение в объекте стремится к накоплению. При отрицательном самовыравнивании объект называется неустойчивым статическим, а при положительном – устойчивым статическим объектом.
Количественно самовыравнивание описывается коэффициентом самовыравнивания, который равен отношению производной от приращения внешнего воздействия к производной от управляемой величины
 1.89
1.89
 – приращение возмущения;
– приращение возмущения;
 – приращение управляемой величины.
– приращение управляемой величины.
Чем больше коэффициент ρ, тем легче осуществляется процесс автоматического управления, т.к. меньше отклонение управляемой величины, а следовательно процесс управления протекает быстрее и качественнее.
Объект с отрицательным самовыравниванием и объект без самовыравнивания не могут работать без регуляторов.
Большинство объектов управления в той или иной мере присуща инерционность, которая вызывает запаздывание во времени между изменением управляющего воздействия и соответствующим изменением управляемой величины. Такое запаздывание в объектах управления может быть переходным и транспортным.
Переходное запаздывание появляется из-за сопротивления перехода вещества из одной емкости в другую или энергии из одного состояния в другое, и всегда наблюдается в тех объектах, где имеются емкости, индуктивности, вращающиеся массы и т. д. Оно определяется как промежуток времени от момента возмущения до начала изменения управляемой величины в результате преодоления имеющихся сопротивлений. Переходное сопротивление отрицательно влияет на процесс управления.
Транспортное запаздывание присуще тем объектам, у которых между управляющим органом и выходом объекта имеются транспортные каналы (трубопроводы, ЛЭП и т. д.). Для прохождения такого канала требуется время, равное отношению длинны канала к скорости движения вещества или энергии.
Разным объектам управления присущи различные запаздывания:
1) одноемкостным объектам присуще только переходное запаздывание
2) двухемкостным и многоемкостным объектам присуще транспортное и переходное запаздывание
3) безъемкостным объектам, запаздывание вообще не присуще
Полное запаздывание объекта определяется суммой всех видов запаздываний в нем.
Опасно влияние любого вида запаздывания на процесс управления в объекте без самовыравнивания.
Любой технологический процесс в том или ином объекте управления связан с притоком, расходом, накоплением и преобразованием некоторой материальной среды или энергии. Многие объекты в процессе работы могут запасать внутри себя рабочую среду, что характеризует аккумулирующую способность рассматриваемого объекта. Аккумулирующая способность достаточно серьезно влияет на регулировочные свойства объекта. Саму эту способность оценивают по емкости объекта, под которым понимают запасенные объектом материал, вещество или энергию. Чем меньше емкость объекта, тем он более чувствителен к возмущающим воздействиям.
Количественно оценить емкость объекта можно при помощи коэффициента емкости, под которым понимают то количество энергии или вещества, которое необходимо подвести к объекту управления или отнести от него чтобы принять управляемую величину на единицу измерения
 1.90
1.90
y – управляемая величина;
С – емкость объекта.
Значение емкости характеризует запас управляемой величины или среды внутри объекта.
Изменение управляемого параметра во времени, представленное графически, называют кривой разгона. Кривые разгона объектов с различными свойствами
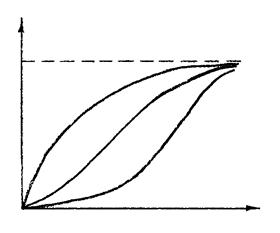 |
1)одноемкостной без передаточного запаздывания
2)многоемкостной без передаточного запаздывания
3) многоемкостной с передаточным запаздыванием
Основные характеристики кривой разгона
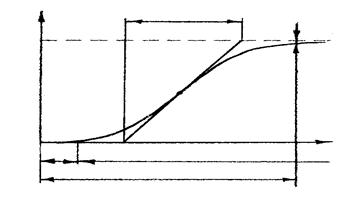 |
T – постоянная времени объекта
Тр – время разгона
τп – транспортное (передаточное) запаздывание
τ0 – переходное запаздывание
yп – точка перегиба
yк – конечное (установившееся) значение управляемой величины
Время разгона – это время от момента подачи возмущения до момента, когда управляемый параметр достигнет нового установившегося значения (в практических целях до 99% установившегося значения).
Постоянная времени – это время разгона объекта без самовыравнивания. Если в объекте есть самовыравнивание и емкость, то постоянная времени равна времени в течение которого отклонение управляемого параметра (yк -y0) от установившегося значения уменьшается в е=2,71 раз.
В практических целях постоянную времени определяют как промежуток времени от момента подачи возмущения до момента, когда управляющий параметр станет равным 0,63 установившегося значения.

Для определения всех вышеназванных временных значений, используют графический метод или формулы
 1.91
1.91
ν – чувствительность объекта к возмущению.
 1.92
1.92
 1.93
1.93

