 2020-06-30
2020-06-30 2559
2559
Система автоматического регулирования может находиться в одном из двух режимов работы: статическом либо динамическом.
Статический, или установившийся, режим имеет место тогда, когда воздействия на систему (как возмущающие, так и управляющие) не изменяются во времени. При этом на объекте регулирования наблюдается равенство подвода и отвода энергии либо вещества, предопределяющее неизменность во времени регулируемой величины. Типичный пример – работа САР частоты вращения вала главного судового двигателя при движении в штилевых условиях и неизменном положении органов управления. Частота вращения вала при этом постоянна.
Свойства САР в статике принято иллюстрировать с помощью статических характеристик. Это зависимости регулируемой величины от возмущения (статическая характеристика режима возмущения) и от управляющего воздействия (статическая характеристика режима управления), снятые на различных установившихся режимах:
y = f (z); y =f (u).
Типичный вид такой характеристики показан на рис.1.

Рис.1 Статическая характеристика САР
Важной величиной, содержащейся в статической характеристике и несущей информацию о точности САР установившихся режимах, является неравномерность регулирования
Δ = ymax - ymin.
Это диапазон изменения регулируемой величины, соответствующий полному диапазону изменения возмущения. Чем меньше эта величина, тем точнее работает САР в статике. Часто используется отношение неравномерности регулирования к среднему значению регулируемой величины
d = D / у ср ,
ĸᴏᴛᴏᴩᴏᴇ принято называть степенью неравномерности и обычно выражается в процентах. Учитывая зависимость отконкретной системы степень неравномерности должна быть больше или меньше, должна быть и равной нулю. В последнем случае система на всœех установившихся режимах поддерживает строго одно и то же значение регулируемой величины. Такие САР называют астатическими в отличие от статических, которым свойственно ненулевое (хотя, должна быть, и весьма малое) значение степени неравномерности. Несмотря на то, что астатические САР в отношении точности поддержания регулируемой величины в статике превосходят статические, последние широко применяются по причинœе их простоты и меньшей стоимости.
Динамический режим, иначе называемый переходным процессом, возникает тогда, когда воздействие на систему изменяется во времени. При этом на объекте регулирования возникает небаланс подвода и отвода энергии либо вещества и, как следствие, происходит изменение во времени регулируемой величины. Пример – работа САР частоты тока судовой электростанции при включении дополнительных потребителœей электроэнергии.
Динамической характеристикой САР (рис.2) принято называть зависимость регулируемой величины от времени при некоторых заранее оговоренных формах внешних воздействий y = f (t).
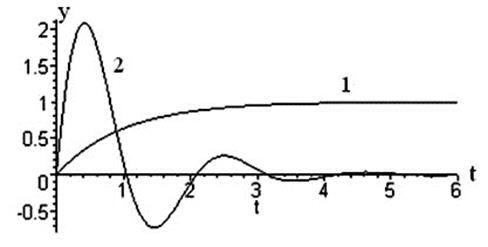
Рис. 2 Динамические характеристики САР.
1 – статической САР,
2 – астатической САР.
Эта характеристика несёт дополнительную информацию о динамических свойствах системы, которая часто играет определяющую роль. Именно здесь проявляется роль регулятора, тогда как в установившемся режиме, когда нет причины изменения регулируемой величины, достаточно вручную задать объекту регулирования желаемый режим работы.

