 2014-02-05
2014-02-05 1895
1895Рис. 9. Гидроусилитель с возвратной пружиной
Рис. 7. Схема регулятора расхода
Рис. 6. Схемы клапанов
Подвод жидкости к торцевой поверхности золотника через канал малого диаметра создает демпфирующее действие и устраняет колебания золотника и управляющего давления.
Если ГОТ содержит несколько гидромоторов, приводящих во вращение отдельные колеса самоходной машины, то она выполняет также функции механического дифференциала. В этом случае, если одно из колес попало на скользкую поверхность и начало пробуксовывать, к остальным колесам не может быть подведена сила тяги, большая, чем сила тяги буксующего колеса, определяемая его сцеплением с дорогой. Для увеличения проходимости самоходных машин ГОТ иногда оснащают регуляторами расхода, уменьшающими подачу жидкости от насоса к гидромотору буксующего колеса и увеличивающими в результате этого давление нагнетания и силу тяги на остальных колесах (рис. 7). Жидкость от насоса под давлением рн нагнетания подводится к регулятору и от него отводится к двум гидромоторам. При прохождении жидкости через калиброванные отверстия 1 и 4 ее давление несколько уменьшается. В соответствии с известным уравнением расхода давление р1 зависит от расхода G1 жидкости, поступающей к левому гидромотору, а давление р2 зависит от расхода Q2 жидкости, поступающей к правому гидромотору. При прямолинейном движении самоходной машины Q1 = Q2 и P1 = P2, результате чего золотник 2 находится в среднем положении. При этом давление на выходе из регулятора р1* = р1 и р2* = Р2.
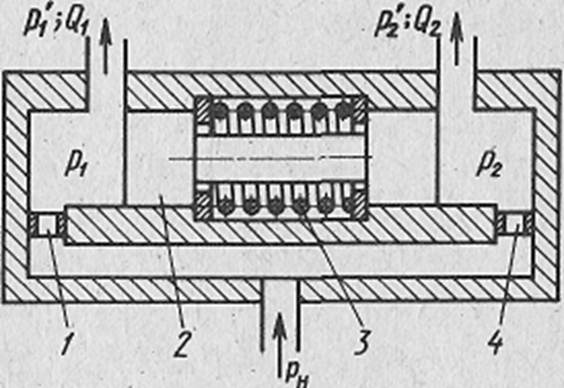 |
При буксующем левом колесе и неподвижной самоходной машине вся жидкость от насоса поступает к левому гидромотору (расход (Q2 = 0). Давление р1 определяется силой сцепления буксующего колеса с дорогой и имеет невысокое значение. В результате действия дросселирующего отверстия 1 давление pi немного меньше давления рн, в этом случае равного давлению р2. Поэтому сила тяги на небуксующем колесе не намного больше силы тяги на буксующем колесе, и самоходная машина не в состоянии тронуться с места. Под действием разности давлений р2 и p1 золотник 2 перемещается влево, перекрывая отверстие, через которое жидкость поступает к гидромотору буксующего колеса. При этом давление р1* сохраняется прежним, а давления pi, рн и р2* возрастают. В результате увеличения давления р2* жидкости, подводимой к гидромотору небуксующего колеса, машина трогается с места. Если в процессе движения левое колесо останется на скользкой поверхности, то оно будет катиться с буксованием. Расход Qi будет по-прежнему больше расхода Q2, а давление р'1* меньше давления р2*.
Регулятор имеет пружину 3 с предварительной затяжкой, которая
удерживает золотник 2 в среднем положении при движении самоходной
машины на повороте, когда расход Q1 ненамного отличается от расхода
Q2. Регулятор следует применять только на самоходных машинах высо-
кой проходимости, так как калиброванные отверстия 1 и 4 создают дополнительное сопротивление движению жидкости и снижают КПД трансмиссии.
Для управления регулируемыми насосами и гидромотором используют различные гидроусилители. Гидроусилитель содержит распределитель и управляемый им гидродвигатель и может иметь обратную связь выходного звена гидродвигателя с входным звеном гидрораспределителя. Если этой связи нет, то любому перемещению входного звена распределителя соответствует непрерывное перемещение (до максимального значения) выходного звена гидродвигателя. При наличии обратной связи гидроусилитель представляет собой следящий гидропривод (следящую систему), в котором перемещение выходного звена пропорционально перемещению входного звена. При автоматическом управлении гидромашинами ОГП можно применять усилители как с обратной связью так и без нее.
Ниже рассмотрены усилители только с обратной связью.
На рис. 8, а показана схема гидроусилителя 452 с поршнем типа "тандем", применяемого для управления аксиально-поршневой с поворотной люлькой гидромашины 207.20, выпускаемой Московским машиностроительным заводом имени М.И. Калинина. Рабочая жидкость системы управления через отверстие в неподвижном поршне 3, установленном в корпусе 4, подается в правую полость цилиндра. При перемещении'золотника 1 влево левая полость цилиндра соединяется с правой, и корпус 2 гидроусилителя перемещается влево до тех пор, пока не закроется открывшееся окно распределителя. Закрытие этого окна, вызванное перемещением корпуса, представляет собой обратную связь выхода гидроусилителя с его входом. При перемещении золотника вправо левая полость цилиндра сообщается со сливом, и корпус гидроусилителя перемещается вправо, пока не закроется окно распределителя. Корпус гидроусилителя соединен с цапфой (укрепленной на люльке гидромашины) и осуществляет ее поворот.
На рис. 8, б показана схема гидроусилителя, предназначенного для управления аксиально-поршневой гидромашиной с наклонным диском фирмы "Лукас" (Великобритания). Поршень 6 типа "тандем" расположен в цилиндрах корпуса 9 гидромашины. В средней части поршень при помощи сухаря 7 соединен с наклонным диском 8 гидромашины. Жидкость от насоса подпитки подводится в верхний цилиндр. При перемещении золотника 5 вверх жидкость по каналу в поршне из верхнего цилиндра поступает в нижний цилиндр большого диаметра, и поршень движется вверх до тех пор, пока золотник не перекроет окна.
При перемещении золотника вниз открывается окно, соединяющее нижний цилиндр со сливной линией (слив осуществляется внутрь гидромашины) „ Поршень перемещается вниз, пока не закроется открывшееся ранее окно распределителя.
На рис. 8, в показана схема гидроусилителя, предназначенного для управления нереверсивным насосом с наклонным диском типа "Вер-дис", отличающаяся от предыдущих наличием устройства "сопло—заслонка", позволяющего просто осуществить обратную связь. Жидкость под давлением по каналу 14 поступает внутрь цилиндра сервомотора и через сопло 10 в поршне 11 свободно вытекает внутрь насоса. Поршень 11 соединен с наклонным диском 15. Заслонка 12 перемещается при помощи кулачка 13. При работе гидромашины в режиме насоса наклонный диск под действием приложенных к нему сил со стороны поршней блока цилиндров насоса стремится занять вертикальное положение.
 |
Рис. 8. Схемы гидроусилителей
При этом сопло приближается к заслонке, давление в цилиндре возрастает, и наклонный диск останавливается. Сила давления жидкости, действующая на поршень, уравновешивает силу, приложенную к поршню со стороны наклонного диска. При повороте кулачка и перемещении заслонки давление в гидроцилиндре изменяется, и поршень перемещается вслед за заслонкой.
При движении самоходной машины по инерции или на спуске с прикрытой дроссельной заслонкой карбюратора двигателя насос работает в режиме гидромотора. Наклонный диск в этом случае стремится повернуться на максимальный угол. Гидроусилитель не препятствует этому. В ОГП устанавливается минимальное передаточное число, в результате чего не происходит резкого торможения самоходной машины. Недостатком усилителя является то, что его можно использовать только с нереверсивным насосом. Для управления насосом фирмы "Гидроматик" использован гидроусилитель с возвратной пружиной (рис. 9). Распределитель гидроусилителя содержит поворачивающийся золотник 3, помещенный в свободно укрепленной гильзе 2. Поршень 1 управляет наклонным писком насоса. При повороте золотника 3 по часовой стрелке жидкость от насоса подпитки поступает в верхнюю часть цилиндра, в результате чего поршень, сжимая нижнюю пружину, опускается вниз. Перемещаясь, поршень при помощи рычага 4 жесткой обратной связи поворачивает гильзу 2. Движение поршня продолжается до тех пор, пока повернувшаяся гильза не закроет окно для прохода жидкости в цилиндр.
В обратную сторону поршень перемещается под действием силы пружины. При этом жидкость из верхней части цилиндра через распределитель поступает на слив.
Поршень показан в положении, которому соответствует вертикальное положение наклонного диска насоса. При повороте золотника 3 против часовой стрелки жидкость поступает в нижнюю часть цилиндра, и поршень поднимается вверх, поворачивая наклонный диск в противоположную сторону, что обеспечивает задний ход самоходной машины.
Максимальный угол поворота золотника в каждую сторону от нейтрального положения составляет 30°.
Типовой гидравлической схемой для экскаваторов с жесткой подвеской рабочего органа является двухпоточная система с двухсекционным насосом, производительность которого регулируется по суммарному давлению, а суммирование протоков обоих насосов осуществляется внутри золотников (рис. 10).
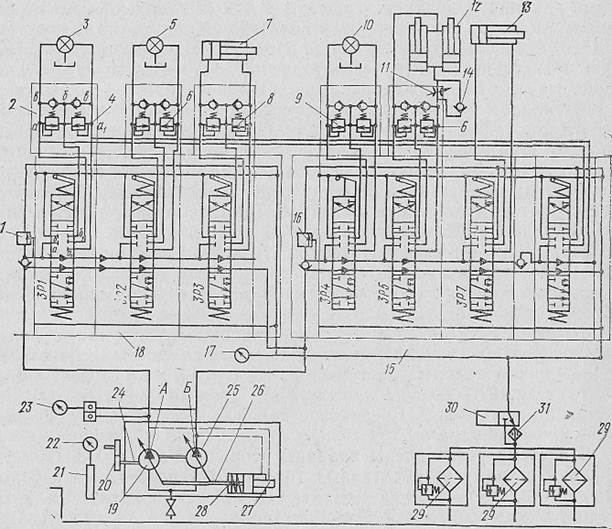
Рис. 10. Гидравлическая схема экскаватора
Вал 24 сдвоенного насоса 19 получает вращение от приводного двигателя через встроенный редуктор 20. Поворотные корпуса 25 сдвоенного насоса установлены на подшипниках, связаны траверсой 26 регулятора мощности и синхронно поворачиваются вокруг оси качания на 26°, чем достигается изменение их производительности. Регулятор мощности представляет собой золотник 27, который, с одной стороны, воспринимает усилие пружины 28, а с другой - давление на выходе из секций насоса. При малых давлениях насосы развивают максимальную производительность. С увеличением давления золотник 27, сжимая пружину, поворачивает поворотные корпуса, при этом снижается производительность насосов, а мощность остается постоянной.
От секций насоса (А и Б) жидкость (масло) поступает в гидрораспределительные блоки 18 и 15 с проточной разгрузкой насоса. В нейтральном положении золотников напорная гидролиния соединена со сливной специальным проточным каналом, который перекрывается при включении любого из золотников блока. Применение такой схемы позволяет плавно включать механизмы и устранить повышенное давление во время включения золотников.
Насосы и их привод защищены от перегрузок предохранительными клапанами первичной защиты 1 и 16. Клапаны настраиваются на максимальное давление, и если оно в системе превышает это значение, то они открываются и жидкость перепускается в сливную магистраль, откуда через радиатор 31 и фильтр 29 - в бак. Если все золотники гидрораспределительного блока 18 находятся в нейтральном положении, то поток от секции А насоса 19 объединяется с потоком от секции Б и идет в гидрораспределительный блок 15. При включении любого из золотников блока 18 потоки от секций А и Б разъединяются, причем слив из гидрораспределителя 18 направляется в бак, а распределительный блок 15 питается только потоком от секции Б насоса. Таким образом, если работают цилиндры 12, цилиндры ковша 13 или гидромотор механизма передвижения 10, то используется суммарная производительность насосной установки. Работа цилиндра рукояти 7 или гидромотора механизма поворота 3 обеспечивается всегда только секцией А насосной установки.
Золотники ЗР2 блока 18 и ЗР4 блока 15 служат для привода гусеничного хода; подключение гидромоторов передвижения 10 и 5 аналогично подключению гидромотора поворота стрелы с элементами защиты 9 и 6. Золотник ЗРЗ блока 18 управляет гидроцилиндром рукояти 7. Соединение каналов а с а1 и б с б1 дает движение цилиндра в одну сторону; а с б1 и а с б — в другую.
В системе установлены клапаны вторичной защиты 8. Они защищают систему от реактивных (пассивных) перегрузок, которые могут возникнуть в запертом гидроцилиндре (золотник в нейтральном запертом положении, как показано на рис. 10). При срабатывании клапанов жидкость перебрасывается из магистрали повышенного давления в магистраль пониженного давления. Кроме того, через канал в магистраль соединяется со сливом, в результате чего осуществляется подпитка или удаление излишка жидкости. Подпитка происходит при передаче жидкости из штоковой полости в поршневую или при дренажных утечках, слив — во время перемещения жидкости из поршневой полости в штоковую.
Золотник ЗРЗ секции насоса А независимо от секции насоса Б гидрораспределительного блока 18 дает возможность совмещать движение гидроцилиндра рукояти 7 с движением гидроцилиндра стрелы 12 или гидроцилиндра ковша 13 при независимом управлении каждым из совмещаемых движений. Кроме того, включением золотника ЗР7 блока 15 имеется возможность при нейтральном положении золотников ЗР4, ЗР5 и ЗР6 подать жидкость от обеих секций насоса в цилиндр 7 поворота рукояти. Регулирование скоростей совмещаемых и несовмещаемых движений осуществляется различной степенью перекрытия каналов соответствующими золотниками.
Золотники ЗР2 блока 18 и ЗР4 блока 15 управляют соответственно гидромоторами левой 10 и правой 5 гусениц, золотники ЗР5 и ЗР6 блока 15 управляют соответственно цилиндрами подъема стрелы 12 и поворота ковша 13. Подключение цилиндра 13 аналогично цилиндру 7. В системе привода цилиндра 13 не имеется клапанов вторичной защиты. Гидроцилиндр 12 поворота стрелы, кроме блока вторичной защиты 6, работающего аналогично блоку вторичной защиты 8 цилиндра 7 поворота рукояти, имеет в магистрали соединяющие поршневые полости цилиндров — регулируемый дроссель 11 и обратный клапан 14. Гидродвигатель 3 имеет вторичную защиту 4. При подаче жидкости в поршневые полости во время подъема стрелы жидкость без препятствий проходит через обратный клапан 14. При опускании стрелы без использования насосной установки жидкость идет через дроссель 11, что ограничивает скорость опускания, предупреждает разрыв потока, уменьшает динамические нагрузки.
Слив от блока распределителей 18 и 15 поступает в бак через двухпозиционный золотник 30, который позволяет направлять рабочую жидкость в фильтры 29, установленные параллельно, или через радиатор 31, или минуя его. Для контроля настройки предохранительных клапанов устанавливается манометр 23, который может поочередно подключаться к напорным линиям секций А и Б насоса 19. Давление в сливной магистрали контролируется манометром 17, а температура рабочей жидкости — датчиком 21 с указателем 22.
Одной из тенденций развития СДМ является широкое использование объемного гидропривода. Усложнение гидросхем приводит к увеличению трудоемкости ТО и ТР, неоправданные разборки элементов гидропривода снижают их ресурс. Применение методов диагностирования гидропривода позволяет значительно сократить время поиска дефекта, снизить трудозатраты при ТО и ТР. Существующие методы диагностирования гидропривода по трудоемкости их реализации условно можно разделить на пять групп.
К первой группе относится наиболее трудоемкий статопараметрический метод, требующий отвода из гидросистемы потока рабочей жидкости.
Ко второй группе относятся методы, требующие установки в гидросистему датчиков, имеющих контакт с рабочей жидкостью: методы амплитудно-фазовых и переходных характеристик, термодинамический метод.
К третьей группе относятся методы, требующие отбора проб рабочей жидкости: спектральный анализ и индикация инородных примесей.
К четвертой группе относятся методы, требующие установки датчиков, не имеющих контакта с рабочей жидкостью: акустический, виброакустический, силовой, измерение скорости нарастания усилия на исполнительном элементе.
К пятой группе относится наименее трудоемкий кинематический метод, не требующий установки специальных датчиков.
Статопараметрический метод основан на измерении параметров функционирования гидропривода: давления Р (МПа) и расхода потока рабочей жидкости Q (л/мин). Метод широко используется на практике и позволяет определить состояние каждого элемента гидросистемы. При диагностировании насоса вычисляется объемный КПД

где QФ – фактическая (измеренная) подача насоса, л/мин;
QТ – теоретическая подача насоса, л/мин.
На практике вместо QФ определяют подачу QН при частоте вращения вала насоса nн, нагружая насос до номинального давления Рн. Учитывая, что при малых давлениях величиной утечек в гидроагрегатах можно пренебречь, вместо QТ при частоте вращения n0 определяется величина Q0 при давлении Р0 < 0,05 РН. Проведение измерений должно проводиться при nн = n0. Так как на СДМ, снабженных дизелями с центробежными регуляторами частоты вращения это условие практически невыполнимо, для повышения точности измерений при вычислении η0 вводится корректировка изменения частоты вращения

