 2014-02-02
2014-02-02 3885
3885В моментных двигателях ротор, развивая необходимый момент, поворачивается лишь на весьма малые углы, составляющие долю его оборота. Таким образом, двигатель работает практически с неподвижным ротором или, как говорят, в режиме короткого замыкания.
В качестве моментных могут быть использованы двигатели различных типов как постоянного, так и переменного тока.
Например, у двигателя постоянного тока независимого возбуждения момент кроткого замыкания пропорционален приложенному напряжению. У асинхронного двигателя (трехфазного или двухфазного) момент определяется квадратом напряжения в цепи статора, причем в двухфазном двигателе достаточно регулировать ток в одной обмотке – обмотке управления и изменять момент за счет внесения асимметрии.
Наиболее рационально использование двухфазного синхронного двигателя с возбуждением от постоянного магнита и питанием обмотки статора постоянным током (рис.5.11). Изменяя соотношение токов от I1=max, I2=0 до I1=0, I2=max, можно обеспечить поворот ротора в пределах 900. При I1=max положение ротора будет совпадать с осью обмотки 1, при I2=max – с осью обмотки 2. В этом режиме по сути дела мы имеем двигатель постоянного тока, работающий без коллектора в пределах одного полюсного деления. В этом случае коллектор не нужен, так как нет необходимости в коммутации. Более того, коллектор крайне нежелателен, так как изменения сопротивления щеточного контакта приводит к нестабильности развиваемого момента и, как следствие, к колебаниям ротора около положения равновесия. В маломощных установках взамен синхронной машины можно применять поворотный трансформатор (без щеточного контакта). Если на обмотки статора подавать питание от дифференциального усилителя постоянного тока, а одну из обмоток ротора использовать в качестве обмотки возбуждения.
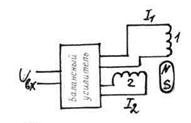 |
Рис.5.11
При необходимости поворота ротора на угол больше 900 уже требуется коммутатор. В этом случае целесообразно применять вентильный двигатель, коммутируя обмотки посредством полупроводниковых приборов за счет сигналов. Подаваемых от датчика положения оси ротора. Датчик может быть построен на тех же принципах, сто и рассмотренные выше датчики вентильного двигателя. Можно также использовать поворотный трансформатор.
Моментный двигатель в отличие от обычных (вращающихся) двигателей представляет собой в первом приближении не интегрирующее звено, а пропорциональное. Поэтому при необходимости иметь систему с астатизмом должны быть введены интегрирующие звенья. К пропорциональным звеньям следует также отнести и двигатели для микропремещений, рассмотренные в предыдущем параграфе.
Системы с моментными двигателями отличаются повышенным быстродействием. Так как двигатель не вращается, то его механическая энергия не оказывает влияния на динамику системы. Переходные процессы определяются в основном электромагнитной инерцией обмоток. Так как электромагнитная постоянная двигателя обычно существенно меньше электромеханической, то переходные процессы завершаются за боле короткие промежутки времени, чем при отработке перемещений.

