 2014-02-18
2014-02-18 1336
1336Индуктивные датчики с изменяющейся площадью перекрытия полюсов.
Эквивалентная магнитная схема:
Проведем расчет:
Получили линейную функцию смещения для L.
- измерительный преобразователь в виде трансформатора, вторичное напряжение которого изменяется в результате изменения воздушного зазора в сердечнике (или взаимного перемещения обмоток) пропорционально измеряемой величине (перемещению, усилию).
По закон электромагнитной индукции:

ψ – потокосцепление; ψ = ФW; Ф – поток; W – число витков. ЭДС в витках возникает только при изменении потокосцепления.
Происходит перекачка энергии из одной катушки в другую.


Структурная схема трансформаторного датчика:
Магнитная цепь имеет вид:
, где Rв – сопротивление воздушного зазора;
Rу - сопротивление утечки;
- Недифференциальный трансформаторный датчик:

Проведем для неё расчет:
В первичную цепь добавляют активное сопротивление Rд, величина которого значительно больше  , тем самым
, тем самым  становиться независимым от магнитного сопротивления цепи Rм.
становиться независимым от магнитного сопротивления цепи Rм.
Тогда получим:
- Дифференциальный трансформаторный датчик с поступательным перемещением ротора:

Эквивалентная электрическая цепь:
Для неё имеем:
- Дифференциальный датчик с угловым перемещением ротора.
Существуют разные варианты возможного включения обмоток в электрическую схему:
1). Дифференциальная схема по ЭДС
 , предполагается, что
, предполагается, что
выходная обмотка - третья
Рассчитаем:

Соединение обмоток должно быть таким, что бы ЭДС вычитались:
2). Дифференциальность по потоку:
Схема соединения обмоток должна быть такая, чтобы первичные обмотки w1 и w2 были соединены последовательно; w3 – вторичная обмотка, Rд находиться в цепи первичной обмотки; U3=Uвых(e3). Тогда ЭДС во вторичной обмотке:
В итоге получим линейные характеристики:
Диапазон трансформаторного датчика достаточно широк.
- Схема трансформаторного датчика для больших перемещений якоря:
, где w1- первичная обмотка, w2- вторичная скользящая обмотка.
Рассчитав, получим напряжение для среднего витка  :
:

Тогда:
-напряжение для среднего витка.
Для витков, находящихся слева от среднего, ЭДС будет больше так как их пронизывает больший поток, а справа меньше. Но так как каждому левому витку соответствует правый виток, то сумма ЭДС правый + левый будет равна ЭДС среднего витка.

5. Феррозонд.
Феррозонд, устройство для измерения напряженности Н магнитного поля, включает пермаллоевый сердечник, две обмотки — возбуждения и индикаторную. Значение Н определяется по изменению магнитного состояния сердечника под действием внешнего магнитного поля и поля катушки возбуждения. Феррозонд применяется в магнитной дефектоскопии, при поисках полезных ископаемых, для измерения магнетизма Луны и планет, а также магнетизма биологических объектов. Датчик направления (феррозонд) представляет собой три ортогонально расположенных датчика магнитного поля. На выходе феррозонда присутствует аналоговый сигнал, величина которого пропорциональна углу поворота относительно магнитного меридиана Земли.
Феррозонд, как датчик магнитного курса:
|
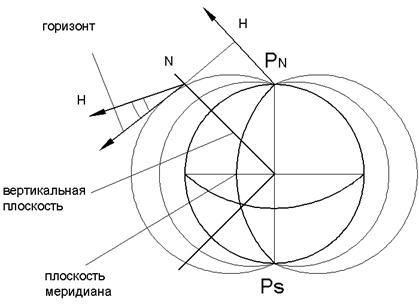
H наклонена на угол α к плоскости горизонта.
Север-юг – проекция Hcosα
.
Получим выражение для  :
:
, где НС – намагничивающая сила, Н – напряженность магнитного поля Земли.
Схема феррозонда:
Тогда:
Необходимо чтобы  , для того, чтобы
, для того, чтобы в качестве сердечника выбирают материал с узкой петлей гистерезиса (пермаллой, супермаллой). Сделано это для того чтобы относительно небольшими изменениями напряженностями в
в качестве сердечника выбирают материал с узкой петлей гистерезиса (пермаллой, супермаллой). Сделано это для того чтобы относительно небольшими изменениями напряженностями в  вводить стержень в состояние насыщения, то есть малыми энергозатратами заставить стержень переходить из состояния ненасыщенного в насыщенное.
вводить стержень в состояние насыщения, то есть малыми энергозатратами заставить стержень переходить из состояния ненасыщенного в насыщенное.
Таким образом:
Такое соединение делает  перемагниченным
перемагниченным
Тогда:

Этот компас имеет широтные ограничения – средние и экваториальные широты. Для реализации измерения используется принцип максимума – минимума.

Для каждого текущего положения зонда относительно Земли существует определённое положение результирующего потока ΦΣ относительно определённой точки статора.

Дефекты при измерении угла курса.
1). Магнитные курсы и географические отличаются, следовательно необходимо вносить корректировку.

 .
.
2). Есть некоторые инструментальные погрешности из-за собственных магнитных полей самолета.
Существуют механизмы для снижения подобных погрешностей. Цепи постоянного тока и магнитомягкие материалы также создают магнитные поля. Эти погрешности необходимо устранять. Обычно источники подобных возмущений описываются с помощью полинома:

Это девиация – инструментальная погрешность,
Где  - постоянная погрешность (аддитивная), независящая от измеряемой величины, она устраняется тем, что сам корпус показателя этого прибора должен быть доведен до стабильного состояния, стрелка совпала с нулевой риской при нулевом курсе ЛА.
- постоянная погрешность (аддитивная), независящая от измеряемой величины, она устраняется тем, что сам корпус показателя этого прибора должен быть доведен до стабильного состояния, стрелка совпала с нулевой риской при нулевом курсе ЛА.
3).  - полукруговые погрешности, обусловлены наличием ферромагнитных масс твердых постоянных магнитов, имеющих остаточную коэрцитивную силу и цепь постоянного тока. Избавляются от неё с помощью установления в область зонда компенсирующих магнитов.
- полукруговые погрешности, обусловлены наличием ферромагнитных масс твердых постоянных магнитов, имеющих остаточную коэрцитивную силу и цепь постоянного тока. Избавляются от неё с помощью установления в область зонда компенсирующих магнитов.
4).  – четвертные девиации из-за наличия магнитомягких ферромагнитных масс на борту ЛА.
– четвертные девиации из-за наличия магнитомягких ферромагнитных масс на борту ЛА.

