 2015-02-04
2015-02-04 2647
2647Системы автоматического управления с ЦВМ
Пермь, 2011
Предисловие
В последние два десятилетия значительно повысилась надёжность и снизилась стоимость цифровых компьютеров. В связи с этим они всё шире стали применяться в системах управления в качестве регуляторов. За время, равное периоду квантования, компьютер способен выполнить большое количество вычислений и сформировать выходной сигнал, который затем используется для управления объектом. Цифровые системы управления в настоящее время используются в самых разных областях, в том числе в химическом производстве, в авиации и космонавтике, в металлургии и станкостроении, в электроэнергетике и промышленной автоматике.
Основным математическим аппаратом теории дискретных систем является
z-преобразование. С его помощью решаются задачи анализа устойчивости и качества, а также синтеза систем управления, в состав которых входят цифровые датчики и микроконтроллеры.
Классификация дискретных систем по виду квантования сигналов
В непрерывных системах автоматического управления рабочая информация представлена в виде сигналов, описываемых непрерывными функциями времени. Наряду с непрерывными способами передачи и преобразования сигналов широко используются дискретные, в которых осуществляется квантование сигналов. Квантование или дискретизация состоит в представлении непрерывного сигнала его дискретными значениями. В зависимости от вида квантования системы автоматического управления подразделяют на дискретные по уровню (релейные),
|
дискретные по времени (импульсные),
дискретные по уровню и по времени (релейно-импульсные).
Квантование по уровню и по времени осуществляется в цифровых системах управления при преобразовании непрерывных сигналов в цифровую форму или коды.
В многорежимных и многомерных САР, в системах с перестраиваемой структурой, многосвязных, высокоточных и многих других видах САУ получили широкое применение цифровые вычислительные машины.
ЦВМ выполняют функции задатчиков, сравнивающих устройств, устройств коррекции, автоматических регуляторов с быстроперестраиваемыми программами, коммутаторов, управляющих автоматов и других устройств.
Преимущества цифровых регуляторов над аналоговыми:
1. Цифровой регулятор обладает большей гибкостью, поскольку для изменения какого-либо его параметра достаточно просто изменить число, записанное в ячейке памяти;
2. Цифровые сигналы менее чувствительны к шумам и дрейфу параметров оборудования;
3. Цифровая обработка сигналов может производиться с высокой скоростью и точностью;
4. Сложные алгоритмы обработки сигналов лучше всего реализовать с помощью цифровых устройств, так как при этом точность параметров ограничена лишь длиной слова цифрового процессора. Благодаря большим вычислительным возможностям УВМ в цифровых системах можно реализовать сложные алгоритмы управления и обеспечить такие переходные процессы, которые недостижимы в непрерывных системах.
 Функциональная схема САУ с ЦВМ
Функциональная схема САУ с ЦВМ
АЦП обычно проектируют 10–20 разрядными, а ЦАП можно применить с пониженной разрядностью (не менее 7), так как входной сигнал ЦАП имеет малое число двоичных разрядов.
Применение микроЭВМ позволяет:
· упростить САУ путём применения простых и надёжных модулей;
· расположить цифровую вычислительную часть системы в непосредственной близости от основных элементов канала управления;
· сложную обработку поступающей информации;
· решение нескольких задач при обслуживании разных каналов управления с разделением во времени поступающей для обработки информации;
· реализовать практически любой алгоритм управления;
· осуществлять операции оптимизации САУ по статическим и динамическим показателям качества;
· проводить операции контроля и поиска неисправностей.
 | |||||
 | |||||
 | |||||


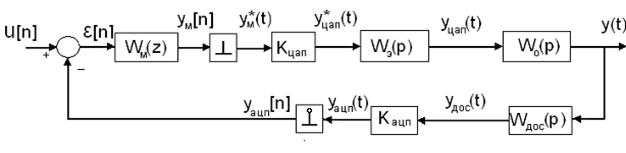
 Структурная типовая схема ЦАС
Структурная типовая схема ЦАС

