 2015-03-20
2015-03-20 3659
3659| Виды математических моделей технических объектов | |||||||||||
| По форме представления ММ | По характеру отображаемых свойств ТО | По степени абстрагирования | По способу получения ММ | ||||||||
| Инвариантные | Функциональные | ММ микроуровня (с распределенными параметрами) | Теоретические | ||||||||
| Алгоритмические | Структурные | ММ макроуровня (со средоточенными параметрами) | Экспериментальные факторные | ||||||||
| Аналитические | ММметауровня | ||||||||||
| Графические (схемные) | |||||||||||
Структура модели - это упорядоченное множество элементов и их отношений. Параметр - это величина, характеризующая свойство или режим работы объекта. Выходные параметры характеризуют свойства технического объекта, а внутренние параметры - свойства его элементов. Внешние параметры - это параметры внешней Среды, оказывающей влияние на функционирование технического объекта.
К математическим моделям предъявляются требования адекватности, экономичности, универсальности. Эти требования противоречивы.
В зависимости от степени абстрагирования при описании физических свойств технической системы различают три основных иерархических уровня: верхний или метауровень, средний или макроуровень, нижний или микроуровень.
Метауровень соответствует начальным стадиям проектирования, на которых осуществляется научно-техничекский1 поиск и прогнозирование, разработка концепции и технического решения, разработка технического предложения. Для построения математических моделей метауровня используют методы морфологического синтеза, теории графов, математической логики, теории автоматического управления, теории массового обслуживания, теории конечных автоматов.
На макроуровне объект рассматривается как динамическая система с сосредоточенными параметрами. Математические модели макроуровня представляют собой системы обыкновенных дифференциальных уравнений. Эти модели используют при определении параметров технического объекта и его функциональных элементов.
На микроуровне объект представляется как сплошная Среда с распределенными параметрами. Для описания процессов функционирования таких объектов используют дифференциальные уравнения в частных производных. На микроуровне проектируют неделимые по функциональному признаку элементы технической системы, называемые базовыми элементами. При этом базовый элемент рассматривается как система, состоящая из множества однотипных функциональных элементов одной и той же физической природы, взаимодействующих между собой и находящихся под воздействием внешней Среды и других элементов технического объекта, являющихся внешней средой по отношению к базовому элементу.
По форме представления математических моделей различают инвариантную, алгоритмическую, аналитическую и графическую модели объекта проектирования.
В инвариантной форме математическая модель представляется системой уравнений вне связи с методом решения этих уравнений.
В алгоритмической форме соотношения модели связаны с выбранным численным методом решения и записаны в виде алгоритма - последовательности вычислений. Среди алгоритмических моделей выделяют имитационные, модели предназначенные для имитации физических и информационных процессов, протекающих в объекте при его функционировании под воздействием различных факторов внешней среды.
Аналитическая модель представляет собой явные зависимости искомых переменных от заданных величин (обычно зависимости выходных параметров объекта от внутренних и внешних параметров). Такие модели получают на основе физических законов, либо в результате прямого интегрирования исходных дифференциальных уравнений. Аналитические математические модели позволяют легко и просто решать задачи определения оптимальных параметров. Поэтому, если представляется возможность получения модели в таком виде, ее всегда целесообразно реализовать, даже если при этом придется выполнить ряд вспомогательных процедур, Такие модели обычно получают методом планирования эксперимента (вычислительного или физического).
Графическая (схемная) модель представляется в виде графов, эквивалентных схем, динамических моделей, диаграмм и т.п. Для использования графических моделей должно существовать правило однозначного соответствия условных изображений элементов графической и компонентов инвариантной математических моделей.
Деление математических моделей на функциональные и структурные определяется характером отображаемых свойств технического объекта.
Структурные модели отображают только структуру объектов и используются только при решении задач структурного синтеза. Параметрами структурных моделей являются признаки функциональных или конструктивных элементов, из которых состоит технический объект и по которым один вариант структуры объекта отличается от другого. Эти параметры называют морфологическими перемененными. Структурные модели имеют форму таблиц, матриц и графов. Наиболее перспективно применение древовидных графов типа И-ИЛИ-дерева. Такие модели широко используют на метауровне при выборе технического решения.
Функциональные модели описывают процессы функционирования технических объектов и имеют форму систем уравнений. Они учитывают структурные и функциональные свойства объекта и позволяют решать задачи как параметрического, так и структурного синтеза. Их широко используют на всех уровнях проектирования. На метауровне функциональные задачи позволяют решать задачи прогнозирования, на макроуровне - выбора структуры и оптимизации внутренних параметров технического объекта, на микроуровне - оптимизации параметров базовых элементов.
ПО способам получения функциональные математические модели делятся на теоретические и экспериментальные.
Теоретические модели получают на основе описания физических процессов функционирования объекта, а экспериментальные - на основе поведения объекта во внешней среде, рассматривая его как “черный ящик”. Эксперименты при этом могут быть физические (на техническом объекте или его физической модели) или вычислительные (на теоретической математической модели).
При построении теоретических моделей используется физический и формальный подходы.
Физический подход сводится к непосредственному применению физических законов для описания объектов, например, законов Ньютона, Гука, Кирхгофа и т.д.
Формальный подход использует общие математические принципы и применяется при построении как теоретических, так и экспериментальных моделей. Экспериментальные модели - формальные. Они не учитывают всего комплекса физических свойств элементов исследуемой технической системы, а лишь устанавливают обнаруживаемую в процессе эксперимента связь между отдельными параметрами системы, которые удается варьировать и (или) осуществлять их измерение. Такие модели дают адекватное описание исследуемых процессов лишь в ограниченной области пространства параметров, в которой осуществлялось варьирование параметров в эксперименте. Поэтому экспериментальные математические модели носят частный характер, в то время как физические законы отражают общие закономерности явлений и процессов, протекающих как во всей технической системе, так и в каждом ее элементе в отдельности. Следовательно, экспериментальные математические модели не могут быть приняты в качестве физических законов. Вместе с тем методы, применяемые для построения этих моделей широко используются при проверке научных гипотез.
Функциональные математические модели могут быть линейные и нелинейные. Линейные модели содержат только линейные функции величин, характеризующих состояние объекта при его функционировании, и их производных. Характеристики многих элементов реальных объектов нелинейные. Математические модели таких объектов включают нелинейные функции этих величин и их производных и относятся к нелинейным.
Если при моделировании учитываются инерционные свойства объекта и (или) изменение во времени объекта или внешней Среды, то модель называют динамической. В противном случае модель - статическая. Математическое представление динамической модели в общем случае может быть выражено системой дифференциальных уравнений, а статической - системой алгебраических уравнений.
Если воздействие внешней Среды на объект носит случайный характер и описывается случайными функциями. В этом случае требуется построение вероятностной математической модели. Однако такая модель весьма сложная и ее использование при проектировании технических объектов требует больших затрат машинного времени. Поэтому ее применяют на заключительном этапе проектирования.
Большинство проектных процедур выполняется на детерминированных моделях. Детерминированная математическая модель характеризуется взаимно однозначным соответствием между внешним воздействием на динамическую систему и ее реакцией на это воздействие. В вычислительном эксперименте при проектировании обычно задают некоторые стандартные типовые воздействия на объект: ступенчатые, импульсные, гармонические, кусочно-линейные, экспоненциальные и др. Их называют тестовыми воздействиями.
Продолжение Таблицы “Классификация математических моделей
| Виды математических моделей технических объектов | |||||||
| По учету физических свойств ТО | По способности прогнозирования результатов | ||||||
| Динамические | Детерминированные | ||||||
| Статические | Вероятностные | ||||||
| Непрерывные | |||||||
| Дискретные | |||||||
| Линейные | |||||||
| Нелинейные | |||||||
87 вопрос. Приведите основные этапы проектирования микропроцессорных систем управления и раскройте задачи, решаемые на каждом этапе.
Этапы проектирования микропроцессорных систем
Микропроцессорные системы по своей сложности, требованиям и функциям могут значительно отличаться надежностными параметрами, объемом программных средств, быть однопроцессорными и многопроцессорными, построенными на одном типе микропроцессорного набора или нескольких, и т.д. В связи с этим процесс проектирования может видоизменяться в зависимости от требований, предъявляемых к системам. Например, процесс проектирования МПС, отличающихся одна от другой содержанием ПЗУ, будет состоять из разработки программ и изготовления ПЗУ.
При проектировании многопроцессорных микропроцессорных систем, содержащих несколько типов микропроцессорных наборов, необходимо решать вопросы организации памяти, взаимодействия с процессорами, организации обмена между устройствами системы и внешней средой, согласования функционирования устройств, имеющих различную скорость работы, и т. д. Ниже приведена примерная последовательность этапов, типичных для создания микропроцессорной системы:
1. Формализация требований к системе.
2. Разработка структуры и архитектуры системы.
3. Разработка и изготовление аппаратных средств и программного обеспечения системы.
4. Комплексная отладка и приемосдаточные испытания.
Этап 1. На этом этапе составляются внешние спецификации, перечисляются функции системы, формализуется техническое задание (ТЗ) на систему, формально излагаются замыслы разработчика в официальной документации.
Этап 2. На данном этапе определяются функции отдельных устройств и программных средств, выбираются микропроцессорные наборы, на базе которых будет реализована система, определяются взаимодействие между аппаратными и программными средствами, временные характеристики отдельных устройств и программ.
Этап 3. После определения функций, реализуемых аппаратурой, и функций, реализуемых программами, схемотехники и программисты одновременно приступают к разработке и изготовлению соответственно опытного образца и программных средств. Разработка и изготовление аппаратуры состоят из разработки структурных и принципиальных схем, изготовления прототипа, автономной отладки.
Разработка программ состоит из разработки алгоритмов; написания текста исходных программ; трансляции исходных программ в объектные программы; автономной отладки.
Этап 4. Комплексная отладка.
Как правило, микропроцессорная система - это система реального времени, т. е. корректность ее функционирования зависит от времени выполнения отдельных программ и скорости работы аппаратуры. Поэтому система считается отлаженной после того, как рабочие программы правильно функционируют на действительной аппаратуре системы в реальных условиях. Дополнительным свойством, которым должны обладать средства комплексной отладки по сравнению со средствами автономной отладки, является возможность управления поведением МПС и сбора информации о ее поведении в реальном времени.
Тенденция развития средств отладки микропроцессорных систем состоит в объединении свойств нескольких приборов в одном комплексе, в создании универсальных средств, пригодных для автономной отладки аппаратуры, генерации и автономной отладки программ и комплексной отладки системы. Эти средства позволяют вести разработку и отладку, постепенно усложняя аппаратуру и программы. При этом разработка, изготовление и отладка планируются поэтапно с нарастанием сложности; новая, неотлаженная аппаратура и программа вводятся в создаваемую систему, присоединяются к проверенной ее части.
Если отладка программ ведется с использованием эмуляционного ОЗУ, а затем изготовляются микросхемы ПЗУ, то микропроцессорная система должна быть протестирована.
Средства отладки на последних этапах не должны влиять на правильность функционирования системы, вносить задержки, дополнительные нагрузки.
При комплексной отладке наряду с детерминированным используется статистическое тестирование, при котором МПС проверяется при изменении исходных переменных в соответствии со статистическими законами работы источников информации. Полнота контроля работоспособности проектируемой системы возрастает за счет расширения диапазона возможных сочетаний переменных и соответствующих им логических маршрутов обработки информации.
Существуют пять основных приемов комплексной отладки микропроцессорной системы:
1) останов функционирования системы при возникновении определенного события;
2) чтение (изменение) содержимого памяти или регистров системы;
3) пошаговое отслеживание поведения системы;
4) отслеживание поведения системы в реальном времени;
5) временное согласование программ.
Комплексная отладка завершается приемосдаточными испытаниями, показывающими соответствие спроектированной системы техническому заданию. Для проведения комплексной отладки МПС используют логические анализаторы и комплексы: оценочные, отладочные, развития микропроцессоров, диагностирования, средств отладки.
На каждом этапе проектирования МПС людьми могут быть внесены неисправности и приняты неверные проектные решения. Кроме того, в аппаратуре могут возникнуть дефекты.
Источники ошибок
Рассмотрим источники ошибок на первых трех этапах проектирования.
Этап 1. На этом этапе источниками ошибок могут быть: логическая несогласованность требований, упущения, неточности алгоритма.
Этап 2. На данном этапе источниками ошибок могут быть: упущения функций, несогласованность протокола взаимодействия аппаратуры и программ, неверный выбор микропроцессорных наборов, неточности алгоритмов, неверная интерпретация технических требований, упущение некоторых информационных потоков.
Этап 3. На этом этапе источниками ошибок могут быть: при разработке аппаратуры - упущения некоторых функций, неверная интерпретация технических требований, недоработка в схемах синхронизации, нарушение правил проектирования; при изготовлении прототипа - неисправности комплектующих изделий, неисправности монтажа и сборки; при разработке программных средств - упущения некоторых функций технического задания, неточности в алгоритмах, неточности кодирования.
Каждый из перечисленных источников ошибки может породить большое число субъективных или физических неисправностей, которые необходимо локализовать и устранить. Обнаружение ошибки и локализация неисправности являются сложной задачей по нескольким причинам: во-первых, из-за большого числа неисправностей; во-вторых, из-за того, что различные неисправности могут проявляться одинаковым образом. Так как отсутствуют модели субъективных неисправностей, указанная задача не формализована. Имеются определенные успехи в области создания методов и средств обнаружения ошибок и локализации физических неисправностей. Эти методы и средства широко используются для проверки работоспособного состояния и диагностики неисправностей дискретных систем при проектировании, производстве и эксплуатации последних.
Субъективные неисправности отличаются от физических тем, что после обнаружения, локализации и коррекции больше не возникают. Однако, как следует из перечня источников ошибок, субъективные неисправности могут быть внесены на этапе разработки спецификации системы, а это означает, что даже после самых тщательных испытаний системы на соответствие ее внешним спецификациям в системе могут находиться субъективные неисправности.
Процесс проектирования - итерационный процесс. Неисправности, обнаруженные на этапе приемосдаточных испытаний, могут привести к коррекции спецификаций, а следовательно, к началу проектирования всей системы. Обнаруживать неисправности необходимо как можно раньше, для этого надо контролировать корректность проекта на каждом этапе разработки.
Проверка правильности проекта
Основные методы контроля правильности проектирования следующие: верификация - формальные методы доказательства корректности проекта; моделирование; тестирование.
Существует много работ по верификации программного обеспечения, микропрограмм, аппаратуры. Однако эти работы носят теоретический характер. На практике пока используют моделирование поведения объекта и тестирование.
Для контроля корректности проекта на каждом этапе проектирования необходимо проводить моделирование на различных уровнях абстрактного представления системы и проверку правильности реализации заданной модели путем тестирования. На этапе формализации требований контроль корректности особо необходим, поскольку многие цели проектирования не формализуются или не могут быть формализованы в принципе. Функциональная спецификация может анализироваться коллективом экспертов или моделироваться и проверяться в опытном порядке для выявления, достигаются ли желаемые цели. После утверждения функциональной спецификации начинается разработка функциональных тестовых программ, предназначенных для установления правильности функционирования системы в соответствии с ее функциональной спецификацией. В идеальном случае разрабатываются тесты, целиком основанные на этой спецификации и дающие возможность проверки любой реализации системы, которая объявляется способной выполнять функции, оговоренные в спецификации. Этот способ - полная противоположность другим, где тесты строятся применительно к конкретным реализациям. Независимая от реализации функциональная проверка обычно заманчива лишь в теоретическом плане, но практического значения не имеет из-за высокой степени общности.
Автоматизация утомительной работы по составлению тестовых программ не только сокращает продолжительность периода конструирования/отладки за счет получения тестовых программ на этапе конструирования (поскольку они могут быть сгенерированы сразу после формирования требований к системе), но и позволяет проектировщику изменять спецификации, не заботясь о переписывании всех тестовых программ заново. Однако на практике разработке тестов часто присваивают более низкий приоритет по сравнению с проектом, поэтому тестовые программы появляются значительно позже его завершения. Но даже если детальные тесты оказываются подготовленными, часто практически нецелесообразно запускать их на имитаторе, так как детальное моделирование требует больших затрат средств на разработку программ и времени на вычисление, в результате большая часть работы по отладке должна откладываться до момента создания прототипа системы.
После обнаружения ошибки должен быть локализован ее источник, чтобы провести коррекцию на соответствующем уровне абстрактного представления системы и в соответствующем месте. Ложное определение источника ошибки или проведение коррекций на другом уровне абстрактного представления системы приводит к тому, что информация о системе на верхних уровнях становится ошибочной и не может быть использована для дальнейшей отладки при производстве и эксплуатации системы. Например, если неисправность внесена в исходный текст программы, написанной на языке ассемблера, а коррекция проведена в объектном коде, то дальнейшая отладка программы ведется в объектном коде; при этом все преимущества написания программы на языке ассемблера сводятся на нет.
1 Изложите сущность мехатронного подхода при проектировании МС
Системныйподходкпроектированиюнабазесистем автоматизированного проектирования с использованием CALS-технологий (объектно-ориентированноепроектирование) являетсяконцептуальнойосновой проектированиямехатронныхмодулейисистем.Необходимоучесть, чтопостроениемехатронныхсистемскачественно новыми характеристиками диктует необходимость принципиально нового подходакихпроектированиюиконструированию.Концептуальной же основой проектирования мехатронныхсистемявляютсяследующиеположения:
1. Основойразработкимехатронныхсистемслужатметодысовмещенного (параллельного) проектирования, предполагающие совмещение во времени некоторых этапов проектирования, выполняемых последовательно притрадиционномпроектировании (например, последовательновыполняется разработка механической, электронной, сенсорной и компьютерной частей системыспоследующейразработкойинтерфейсныхблоков).
2. Синергетическийхарактермехатронныхсистемпроявляетсявтом, что составныечастисистемынепростодополняютдругдруга, нообъединяются таким образом, что образованная ими система начинает обладать новыми свойствами. При этом мехатронные системы, в отличие от традиционных, обладают меньшей структурной избыточностью и большей степенью интеграции. Врезультатеповышаетсяконструктивнаякомпактностьсистемы (вплотьдоминиатюризациивмикромашинах), улучшаютсямассогабаритные идинамические характеристики машин, упрощаются кинематические цепи. Возникаютдополнительныевозможностиприпроектированиимехатронных систем, наилучшимобразомотвечающиетребованиямзаказчика.
3. Интегрированныемехатронныеэлементывыбираютсяразработчиком уженастадиипроектированиямашины, азатемобеспечиваетсянеобходимая инженернаяитехнологическаяподдержкаприпроизводствеиэксплуатации машины. Вэтомрадикальноеотличиемехатронныхмашиноттрадиционных, когда зачастую пользователь был вынужден самостоятельно объединять в систему разнородные механические, электронные и информационно- управляющиеустройстваразличныхизготовителей. Именнопоэтомумногие сложныекомплексы (например, некоторыегибкиепроизводственныесистемы вотечественноммашиностроении) показалинапрактикенизкуюнадежностьи невысокуютехнико-экономическуюэффективность.
4. Проектированиемехатронныхсистембазируетсянаидеяхмодульного конструирования, прикоторомизотдельныхмногофункциональныхмодулей (механической, электронной, компьютерной частей системы) компонуются гибкиесложныесистемымодульнойархитектуры.
5. В мехатронных системах наблюдается перераспределение функциональнойнагрузкиотаппаратных (например, электромеханических) модулейк информационным (компьютерным) модулям. При этом исключается многоступенчатоепреобразованиеэнергиииинформации.
6. При проектировании мехатронных систем широко применяются методы визуализации динамических процессов, протекающих в системах, вплотьдоиспользованиясистемвиртуальнойреальностиприпроектировании сложныхтехническихсистем.
7. Высокий уровень интеллектуализации мехатронных систем диктует необходимость проектирования интеллектуальных систем управления (для борьбыснеопределенностями, сопутствующимифункционированиюсложных динамических систем). При этом необходим обоснованный выбор интеллектуальныхтехнологийприпроектированиимногоуровневыхиерархических системуправления.
8. Использование концепции АКУ (аппарат конфигурируемого управления), укоторойманевренностьявляетсяприоритетнойфункцией. Ранеепри созданиимашинысначалавыполнялибазовоепроектирование (сточкизрения физикиимеханики), азатемвкачествеподсистемыразрабатывалисистему управления. Но оказалось, что можно спроектировать более эффективную машину, если еще на этапе базового проектирования заложить основы системы управления, используя принципы АКУ. При этом машина может реализовать свои функции только благодаря существованию системы управления. Таким способомможно добиться максимальной динамичности системы (машины). Устойчивостьдостигается благодаряналичиюконтуров управления. КонцепцияАКУширокоиспользуетсявсамолетостроении. Практическоевоплощениеданныхпринциповтребуетпривлечениявсех современных методов и средств проектирования сложных систем (включая средства концептуального проектирования), часть из которых была описана выше. Необходимо отметить, что проектирование является одним из самых ответственныхэтаповжизненногоциклапромышленныхизделий, откоторого взначительнойстепенизависитуспехвыполнения (реализации) всехостальных этаповжизненногоцикла, таккакименнонаэтапепроектированияопределяютсявсепараметрысистемы, технологичностьеепроизводства (изготовления), требованиякорганизациипроизводства, эксплуатационныехарактеристикии возможностьутилизации.В качестве примера неудачного проекта можно привести создание атомныхподводныхлодок (авозможно, и всей атомнойэнергетики), когда вопросу утилизации отработавших атомных установок не было уделено должноговнимания. Исейчасэтапутилизацииэтихустановокпородилогром-ныепроблемыиопасностьдляокружающейсреды.
79 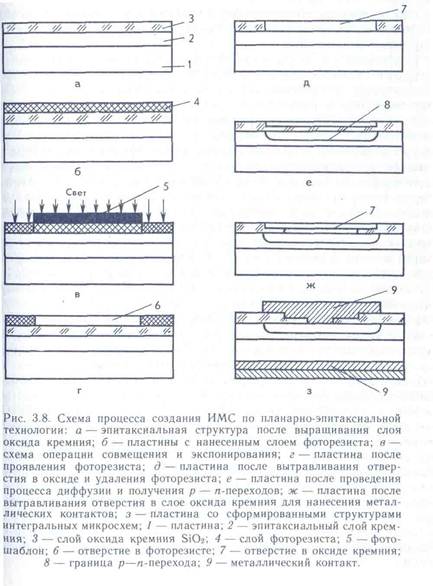 Для того чтобы в заданные участки пластин можно было ввести примеси, в слое оксида кремния необходимо сделать сквозные отверстия. Эту операцию выполняют на этапе фотолитографии — процесса получения фотохимическим способом на пластине полупроводника защитного покрытия (маски) требуемой конфигурации. С помощью фотолитографии проводится удаление пленки оксида кремния над теми участками пластин, где должны быть созданы диффузионные структуры. Эту операцию называют «вскрытием окон»; окна могут быть различных размеров и форм (чаще всего это круг, кольцо или прямоугольник). Применение фотолитографии позволяет достичь воспроизводимости и точности размеров и рисунка р — «п-переходов в кристаллах, получить профили сложной конфигурации, осадить металлы и сплавы на поверхность кристалла заданной конфигурации. Поверхность полупроводниковой пластины покрывают фоторезистом. Для этого ее помещают на диск центрифуги; при вращении центрифуги на пластину наносят несколько капель фоторезиста. После этого фоторезист подвергают сушке, в процессе которой происходит испарение растворителя и пленкообразование. На фоточувствительный слой накладывают фотошаблон — стеклянную пластину с нанесенным на нее рисунком. При экспонировании под действием света, проходящим через прозрачные участки фотошаблона, в слое фоторезиста образуются локальные участки с изменившимися свойствами. Эти участки удаляют на этапе проявления. Для того чтобы удалить оксид и освободить поверхность пластины для введения примеси, проводят травление. Действию травителя (как правило, растворов на основе плавиковой кислоты) подвергают открытые участки пленки оксида. Области пластины, закрытые фоторезистом, остаются недоступными для травления. По завершении комплекса фотолитографических работ пластины промывают в деионизованной воде, высушивают на центрифуге и передают на участок термообработки для диффузионных операций или ионной имплантации.
Для того чтобы в заданные участки пластин можно было ввести примеси, в слое оксида кремния необходимо сделать сквозные отверстия. Эту операцию выполняют на этапе фотолитографии — процесса получения фотохимическим способом на пластине полупроводника защитного покрытия (маски) требуемой конфигурации. С помощью фотолитографии проводится удаление пленки оксида кремния над теми участками пластин, где должны быть созданы диффузионные структуры. Эту операцию называют «вскрытием окон»; окна могут быть различных размеров и форм (чаще всего это круг, кольцо или прямоугольник). Применение фотолитографии позволяет достичь воспроизводимости и точности размеров и рисунка р — «п-переходов в кристаллах, получить профили сложной конфигурации, осадить металлы и сплавы на поверхность кристалла заданной конфигурации. Поверхность полупроводниковой пластины покрывают фоторезистом. Для этого ее помещают на диск центрифуги; при вращении центрифуги на пластину наносят несколько капель фоторезиста. После этого фоторезист подвергают сушке, в процессе которой происходит испарение растворителя и пленкообразование. На фоточувствительный слой накладывают фотошаблон — стеклянную пластину с нанесенным на нее рисунком. При экспонировании под действием света, проходящим через прозрачные участки фотошаблона, в слое фоторезиста образуются локальные участки с изменившимися свойствами. Эти участки удаляют на этапе проявления. Для того чтобы удалить оксид и освободить поверхность пластины для введения примеси, проводят травление. Действию травителя (как правило, растворов на основе плавиковой кислоты) подвергают открытые участки пленки оксида. Области пластины, закрытые фоторезистом, остаются недоступными для травления. По завершении комплекса фотолитографических работ пластины промывают в деионизованной воде, высушивают на центрифуге и передают на участок термообработки для диффузионных операций или ионной имплантации.
98 Какова технология изготовления тонкопленочных ИМС?
Тактико-технические, конструктивно-технологические, эксплуатационные и экономические характеристики ЭВМ и систем определяют примененные в них микросхемы, выполняющие функции преобразования, хранения, обработки, передачи и приема информации.
Микросхемой (интегральной микросхемой - ИМС, интегральной схемой - ИС) называют функционально законченный электронный узел (модуль), элементы и соединения в котором конструктивно неразделимы и изготовлены одновременно в едином технологическом процессе в общем кристалле-основании.
Теория, методы расчета и изготовления микросхем составляют основу микроэлектроники - современной наукоемкой отрасли техники.
По конструктивно-технологическому исполнению микросхемы делятся на полупроводниковые и гибридно-пленочные. Полупроводниковые микросхемы имеют в своей основе монокристалл полупроводникового материала (обычно кремния), в поверхностном слое которого методами литографии и избирательного легирования создаются транзисторы, диоды, резисторы и (иногда) конденсаторы, а соединения между ними формируются по поверхности кристалла с помощью тонкоплёночной технологии. Полупроводниковые микросхемы могут быть однокристальными (монолитными) и многокристальными (микросборками). Однокристальная микросхема может иметь индивидуальный герметизированный корпус с внешними выводами для монтажа на коммутационной (печатной) плате, или быть бескорпусной и входить в состав микросборки.
Многокристальная микросхема (микросборка) представляет собой совокупность бескорпусных микросхем, смонтированных на общей коммутационной плате. В качестве компонентов в микросборке могут присутствовать бескорпусные согласующие резисторы и развязывающие конденсаторы. Вследствие высокой насыщенности связей коммутационная плата выполняется многоуровневой и, таким образом, является миниатюрным аналогом многослойной печатной платы. При изготовлении коммутационной платы может быть использована как тонкоплёночная, так и толстоплёночная технологии.
Гибридно-плёночные микросхемы включают в себя плёночные пассивные элементы (резисторы и конденсаторы), коммутационные проводники, нанесённые непосредственно на подложку из изоляционного материала, и бескорпусные полупроводниковые кристаллы (транзисторы, диоды, диодные матрицы, несложные микросхемы), монтируемые на той же подложке. Пассивные элементы и проводники могут быть выполнены по тонкоплёночной или толстоплёночной технологии.
В качестве активных элементов в полупроводниковых микросхемах используются униполярные (полевые) транзисторы со структурой “металл – диэлектрик (оксид) – полупроводник” (МДП- или МОП-транзисторы) и биполярные транзисторы. В соответствии с этим все полупроводниковые микросхемы делятся на три основные вида: биполярные, униполярные (МДП или МОП) и биполярно-полевые.
Число элементов в интегральной микросхеме характеризует ее степень интеграции. По этому параметру все микросхемы условно делят на малые (МИС – до 102 элементов на кристалл), средние (СИС – до 103), большие (БИС – до 104), сверхбольшие (СБИС – до 106), ультрабольшие (УБИС – до 109) и гигабольшие (ГБИС – более 109 элементов на кристалл).
Наиболее высокой степенью интеграции обладают цифровые интегральные схемы с регулярной структурой: схемы динамической и статической памяти, постоянные и перепрограммируемые ЗУ. Это связано с тем, что в таких схемах доля участков поверхности ИС, приходящаяся на межсоединения, существенно меньше, чем в схемах с нерегулярной структурой.
Укрупненные схемы технологических процессов изготовления полупроводниковых (монолитных) и гибридно-пленочных ИС приведены соответственно на рис. 1 и 2. В последующих разделах приведено описание характерных особенностей выполнения отдельных технологических операций, в основном определяющих основные параметры интегральных микросхем.
 |
Рис. Укрупненная схема технологического процесса изготовления полупроводниковых (монолитных) ИС.
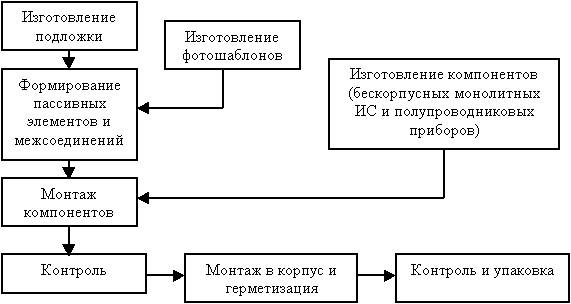 |
Рис. Укрупненная схема технологического процесса изготовления гибридно-пленочных ИС.
104 Каковы назначение, основные характеристики, организация и типичные области применения микроконтроллера PIC16F628 в СУ МС?
Микpоконтpоллеpы семейства PIC имеют очень эффективную систему команд, состоящую всего из 35 инстpукций. Все инстpукции выполняются за один цикл, за исключением условных пеpеходов и команд, изменяющих пpогpаммный счетчик, котоpые выполняются за 2 цикла. Один цикл выполнения инстpукции состоит из 4 пеpиодов тактовой частоты. Таким обpазом, пpи частоте 4 МГц, вpемя выполнения инстpукции составляет 1 мксек. Каждая инстpукция состоит из 14 бит, делящихся на код опеpации и опеpанд (возможна манипуляция с pегистpами, ячейками памяти и непосpедственными данными).
18-выводные FLASH микроконтроллеры PIC16F62X входят в состав распространенного семейства PICmicro PIC16CXX. Микроконтроллеры этого семейства имеют 8-разрядную, высокопроизводительную и полностью статическую RISC архитектуру. PIC16F62X имеют 8-уровневый аппаратный стек и большое количество внутренних и внешних прерываний. В гарвардской архитектуре RISC ядра микроконтроллера разделены 14-разрядная память программ и 8-разрядная память данных. Такой подход позволяет выполнять все инструкции за один машинный цикл, кроме команд ветвления, которые выполняются за два машинных цикла. Ядро микроконтроллеров поддерживает 35 простых в изучении, но очень эффективных инструкций. Дополнительные регистры управления и архитектурные новшества позволяют создавать высокоэффективные устройства. По сравнению с 8-разрядными микроконтроллерами этого класса, при использовании PIC16F62X выигрыш в эффективности использования памяти программ достигает 2:1, а в производительности 4:1. Специальные особенности микроконтроллеров PIC16F62X позволяют сократить число внешних компонентов, что в свою очередь снижает стоимость конечного устройства, повышает надежность системы и уменьшает энергопотребление. Дополнительную гибкость в разработках дает широкий выбор режимов работы тактового генератора: ER генератор, наиболее дешевое решение; LP генератор, минимизирует потребляемый ток; XT генератор, для подключения стандартного резонатора; INTRC внутренний RC генератор; HS генератор, для высокоскоростных режимов работы. Энергосберегающий режим SLEEP, позволяет эффективно использовать микроконтроллеры в устройствах с питанием от батареек или аккумуляторов. Выход из режима SLEEP происходит при возникновении внешних, некоторых внутренних прерываниях и сбросе микроконтроллера. Высоконадежный сторожевой таймер WDT с собственным внутренним RC генератором предотвращает «зависание» программы. В таблице 1-1 сведены основные характеристики микроконтроллеров PIC16F62X. На рисунке 3-1 представлена структурная схема микроконтроллеров PIC16F62X. Микроконтроллеры PIC16F62X удовлетворяют ряду параметров для их использования от зарядных устройств до удаленных датчиков с малым потреблением электроэнергии. FLASH технология и большое количество периферийных модулей, совместимых с предыдущими микроконтроллерами, позволяют быстро и удобно разрабатывать программное обеспечение. Высокая производительность, малая стоимость, легкость в использовании и гибкость портов ввода/вывода – делают PIC16F62X универсальными микроконтроллерами.
Микроконтроллеры PIC16F62X обеспечены полнофункциональным макроассемблером, программным симулятором, эмуляторами, недорогими программаторами. Сторонними организациями разработаны C компиляторы для микроконтроллеров этого семейства.
В состав всех микроконтроллеров PICmicro входит: сброс по включению питания PWRT, сторожевой таймер WDT, программируемая защита кода программы и высокая нагрузочная способность портов ввода/вывода. Микроконтроллеры PIC16F62X программируются в последовательном режиме с использованием двух выводов RB6 и RB7.

Характеристика RISC ядра:
- Тактовая частота от DC до 20МГц
- Поддержка прерываний
- 8-уровневый аппаратный стек
- Прямая, косвенная и относительная адресация
- 35 однословных команд
- все команды выполняются за один машинный цикл, кроме команд ветвления и условия с истинным результатом
Особенности микроконтроллеров:
- Внешний и внутренний режимы тактового генератора
- Прецизионный внутренний генератор 4МГц,
нестабильность +/- 1%
- Энергосберегающий внутренний генератор 37кГц
- Режим внешнего генератора для подключения кварцевого или керамического резонатора - Режим энергосбережения SLEEP
- Программируемые подтягивающие резисторы на входах PORTB
- Сторожевой таймер WDT с отдельным генератором
- Режим низковольтного программирования
- Программирование на плате через последовательный порт (ICSP) (с использованием двух выводов)
- Защита кода программы
- Сброс по снижению напряжения питания BOR
- Сброс по включению питания POR
- Таймер включения питания PWRT и таймер запуска генератора OST
- Широкий диапазон напряжения питания от 2.0В до 5.5В
- Промышленный и расширенный температурный диапазон
- Высокая выносливость ячеек FLASH/EEPROM
- 100 000 циклов стирания /записи FLASH памяти программ
- 1 000 000 циклов стирания /записи EEPROM памяти данных
- Период хранения данных FLASH/EEPROM памяти > 100 лет
Характеристики пониженного энергопотребления:
- Режим энергосбережения: - 100нА @ 2.0В (тип.)
- Режимы работы: - 12мкА @ 32кГц, 2.0В (тип.)
- 120мкА @ 1МГц, 2.0В (тип.) - Генератор таймера TMR1: - 1.2мкА, 32кГц, 2.0В (тип.)
- Сторожевой таймер: - 1мкА @ 2.0В (тип.)
- Двухскоростной внутренний генератор: - Выбор скорости старта 4МГц или 37кГц
- Время выхода из SLEEP режима 3мкс @ 3.0В (тип.)
Периферия:
- 16 каналов ввода/вывода с индивидуальными битами направления
- Сильноточные схемы портов сток/исток, допускающих непосредственное подключение светодиодов
- Модуль аналоговых компараторов:
- Два аналоговых компаратора
- Внутренний программируемый источник опорного напряжения
- Внутренний или внешний источник опорного напряжения
- Выходы компараторов могут быть подключены на выводы микроконтроллера - TMR0: 8-разрядный таймер/счетчик с программируемымпредделителем
- TMR1: 16-разрядный таймер/счетчик с внешним генератором
- TMR2: 8-разрядный таймер/счетчик с программируемымпредделителем и постделителем
- CCP модуль:
- разрешение захвата 16 бит
- разрешение сравнения 16 бит
- 10-разрядный ШИМ - Адресуемый USART модуль
82 В классификации выделяют пять основных способов управления: программное управление, автоматическое регулирование, параметрическая адаптация, структурная адаптация (или самоорганизация) и интелектуальное управление. Эти способы различаются в зависимости от степени определённости траектории системы в фазовом пространстве <x(t), y(t)>, приводящей её в целевую область Y*, то есть к цели, и возможности управления удерживать систему на этой траектории.
Программное управление используется тогда, когда нужная траектория задана и, следовательно, известно необходимое управление u0(t)/ Такое управление можно осуществить, так как известно как будут происходить события при этом. Примеры такой ситуации: работа программно управляемого станка или распечатка набранного текста на принтере.
В большинстве случаев, однако, оказывается, что процессы на неуправляемых входах y0(t) отличаются от предполагаемых или неучитываемые влияния на систему оказывается существенным, что приводит к отклонению траектории. Если при этом имеется возможность наблюдать текущщюю траекторию y(t) и находить разность y(t) – y0(t), то используется управление регулированием, возвращающее выходы системы на заданную траекторию. Этому типу управления соответствуют, например, приводные системы с обратными связями.
При работе ряда системневозможно задать опорную траекторию на весь период времени, либо возникает слишком большие отклонения от неё. В этом случае применяется способ управления- параметрическая адаптация, позволяющий спрогнозировать те- 
11 Что представляют собой мехатронные модули движения «мотор-редуктор»? Перечислите их достоинства, недостатки, основные параметры, области применения?
Мотор – редуктор - в данном устройстве электродвигатель конструктивно объединён с преобразователем движения в единый компактный электропривод.
Достоинство:сокращённые габаритные размеры, уменьшено количество присоединённых деталей и уменьшены затраты на производство.
Применение блочномодульного принципа конструирования мотор редуктор позволяет комбинировать модули двигателя и преобразователя движения различных типов и мощностей обеспечивая таким образом широкий спектр технических характеристик модулей движения (частота вращения и вращающий момент).
В мотор редукторах используют асинхронные двигатели и LGN/
В качестве преобразователей движения используют зубчатые цилиндрические и конические передачи, червячные планетарные винтовые.
Недостаток: отсутствие муфты лишает мотор редуктор предохранительных свойств, что может привести к выходу из строя преобразователя движения и электродвигателя.
По этому в мотор редукторах для их защиты от действующих внезапных перегрузок устанавливают ограничители вращающего момента.
Как правило скорость вращающего выходного вала мотор редуктора должна изменятся в некотором диапазоне. Реализовать это возможно за счёт применения механических вариаторов или за счёт электронного устройства изменяющего скорость вращения вала двигателя.
Если требуется повысить выходной момент на валу мотор редуктора целесообразно использовать конструкции мотор редуктора с механическим вариатором скорости.
Если же необходимо расширить диапазон регулирования скорости либо сохранить минимальные габариты и массу мотор редуктора то предпочтительно использовать частотные преобразователи скорости.
Возможно применение мотор редукторов с механическими вариаторами в комплекте с частотным преобразователями скорости.
Данная комбинация позволяет по средствам изменения скорости вращения вала двигателя осуществлять плавное регулирование скорости
83 Что такое «мехатронная система», какие бывают разновидности МС? Приведите примеры применения МС в бытовой технике. По каким признакам тот или иной бытовой прибор можно отнести к МС?
 Мехатронная система – множество механических, микропроцессорных, электронных и электротехнических компонентов, находящихся в связях друг с другом, образующих определённуюцелосность, единство.
Мехатронная система – множество механических, микропроцессорных, электронных и электротехнических компонентов, находящихся в связях друг с другом, образующих определённуюцелосность, единство.
6 Что такое интеллектуальные сенсоры и виртуальные датчики мехатронных модулей? Поясните принцип их работы и приведите конкретные примеры их использования.

